A Latitude-Free Initial Alignment Method Under a Rocking Pedestal Based on Gradient Descent Optimization
A technique of gradient descent and initial alignment, applied in navigation, complex mathematical operations, instruments, etc. through velocity/acceleration measurement, can solve the problem of limiting the application range of the strapdown attitude system and reducing the autonomy and safety of the strapdown attitude system problems such as inability to complete alignment tasks, etc., to achieve the effect of improving the initial alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings.
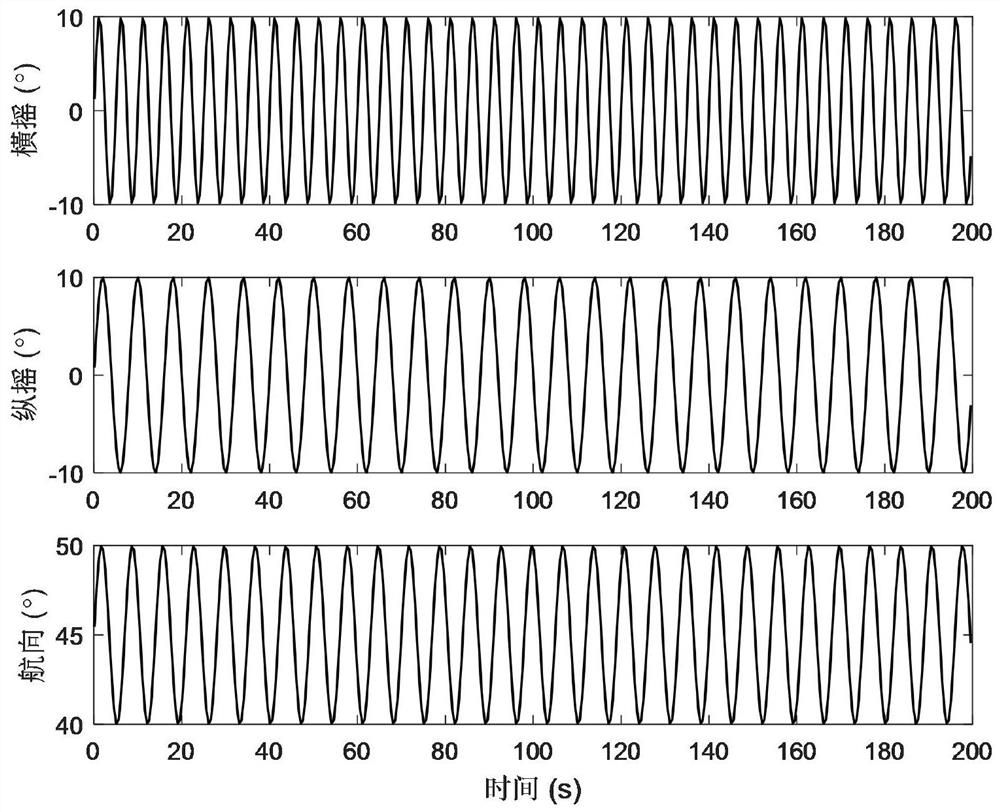
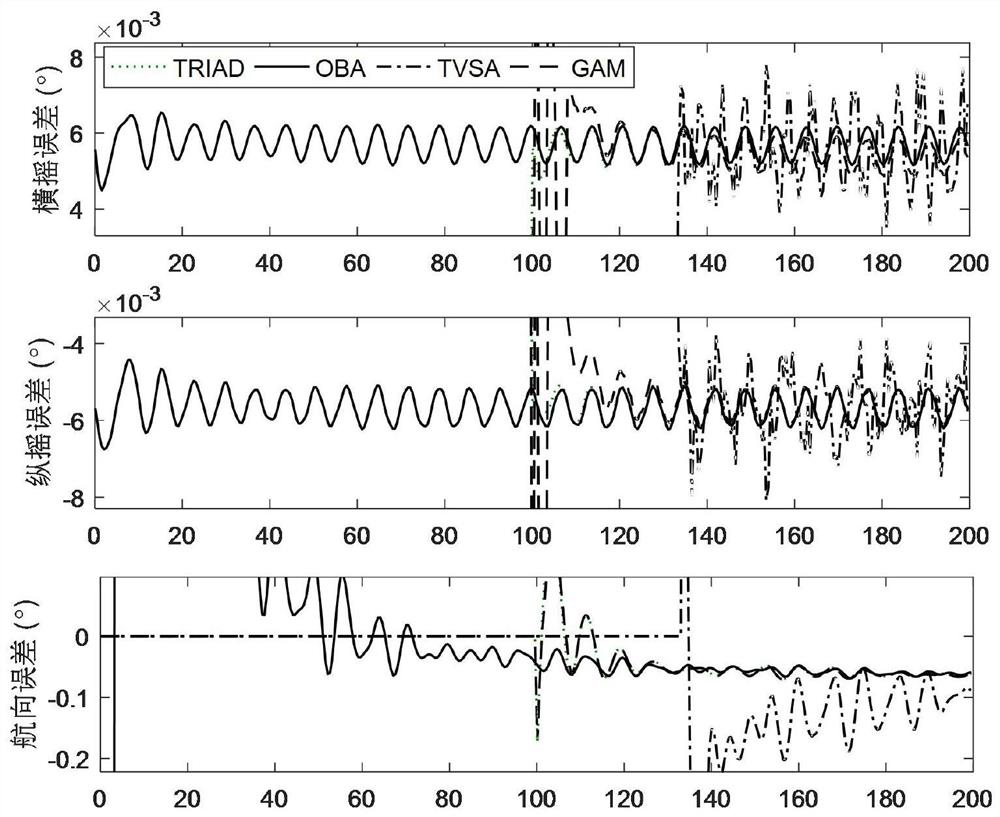
[0033] In order to verify the effectiveness of the present invention, the method of the present invention is simulated using Matlab.
[0034] First, according to the definition of the coordinate system, at t=t 0 time, the carrier coordinate system b and the solidification coordinate system overlap, therefore established Therefore, get Update equation:
[0035]
[0036] in, ——The carrier swing quaternion, which represents the coordinate change of the relative inertial solidification coordinate system caused by the carrier swing motion;
[0037] ——t k The gyroscope outputs angular velocity information at all times.
[0038] Similarly, according to the definition of the coordinate system, the establishment and get Update equation:
[0039]
[0040] in, ——Earth rotation quaternion, which represents the coordinate change of the relative inertial sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com