Intraoperative position navigation system, device and method based on mixed reality
A navigation system and mixed reality technology, applied in the field of surgical simulation, can solve the problems of lack of corresponding systems, devices and methods in application and teaching, and achieve the effects of short anesthesia time, less trauma and quick recovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0045] Such as figure 1 shown
[0046] A mixed reality based intraoperative positional navigation system including:
[0047] Image processing module: used to identify internal organs and blood vessels after importing CT images, and generate three-dimensional images;
[0048] 3D fusion control module: used to deeply fuse the constructed 3D model with real-time collected image data, and dynamically update the display in real time;
[0049] Signal collection module: used to collect video signals and transmit them to the 3D fusion control module;
[0050] Screen recording module: used to record screen recording augmented reality images;
[0051] Computer module: adopts the traditional X64 framework, integrates display, input, and storage, and is used to integrate the functions of each module and realize functional operations;
[0052] Peripheral module: used to connect peripheral devices.
[0053] The above-mentioned intraoperative position navigation system based on mixed real...
Embodiment 2
[0060] An intraoperative navigation device based on a mixed reality intraoperative position navigation system;
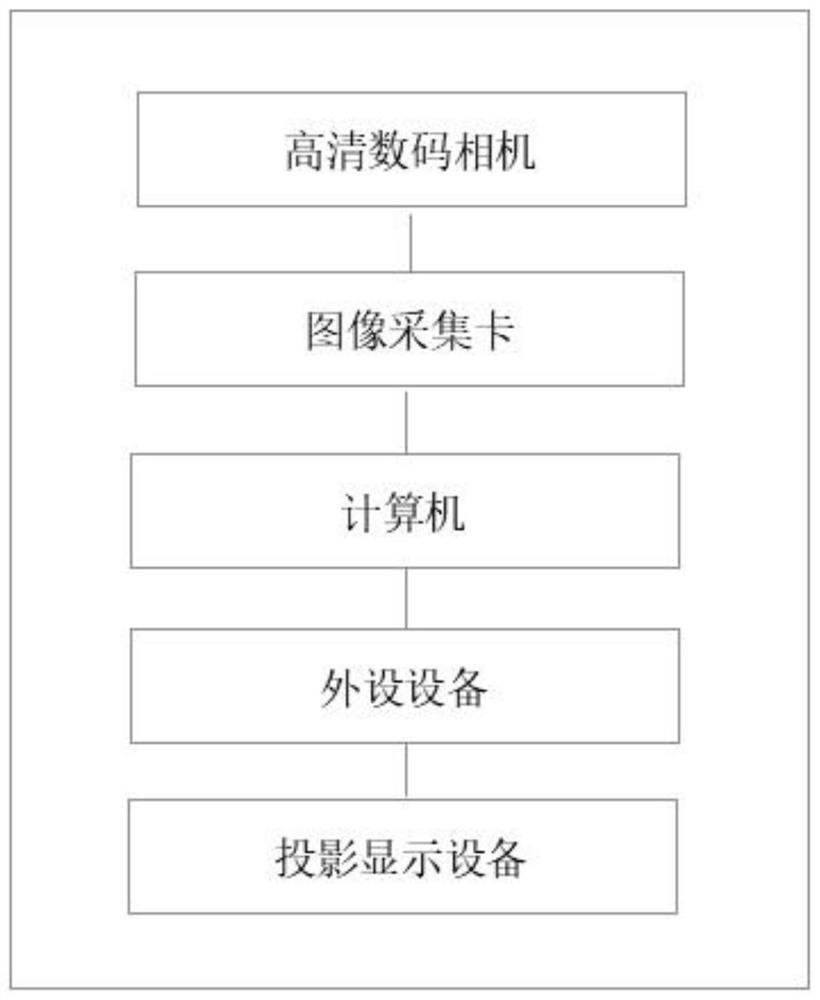
[0061] The intraoperative navigation device includes a computer, a high-definition digital camera, an image acquisition card, projection display equipment and peripheral equipment;
[0062] Described computer adopts traditional X64 frame PC / notebook / all-in-one machine, and described high-definition digital camera adopts HDR-CX405 high-definition digital video camera and auxiliary bracket, and described image acquisition card is connected to realize the data transmission of high-definition digital camera and computer, and described projection display The device is a DellP2719H monitor.
Embodiment 3
[0064] An intraoperative location navigation method based on a mixed reality intraoperative location navigation system;
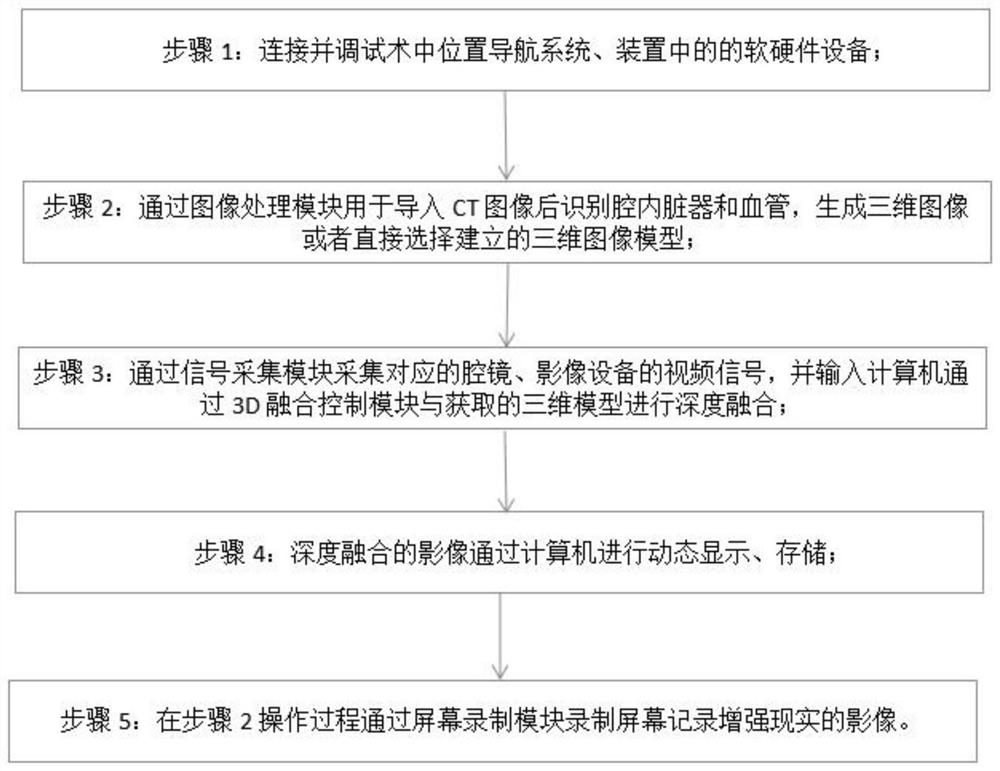
[0065] The intraoperative position navigation method based on the mixed reality intraoperative position navigation system includes the following steps:
[0066] Step 1: Connect and debug the intraoperative position navigation system and the hardware and software equipment in the device;
[0067] Step 2: The image processing module is used to import the CT image to identify the viscera and blood vessels in the cavity, generate a three-dimensional image or directly select the established three-dimensional image model;
[0068] Step 3: Collect the video signals of the corresponding cavity mirror and imaging equipment through the signal acquisition module, and input them into the computer for deep fusion with the acquired 3D model through the 3D fusion control module;
[0069] Step 4: The deeply fused image is dynamically displayed and stored by the computer; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com