Laser radar environment sensing method and system based on deep learning
A technology of lidar and environment perception, applied in the field of deep learning, can solve problems such as troubles, and achieve the effect of low algorithm difficulty, low development and maintenance costs, and high precision of semantic segmentation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] The present invention mainly has following aspects function:
[0044] (1) Spherical mapping of lidar data
[0045] (2) Semantic Segmentation
[0046] (3) Accuracy analysis
[0047] 1 The overall technical design of the system
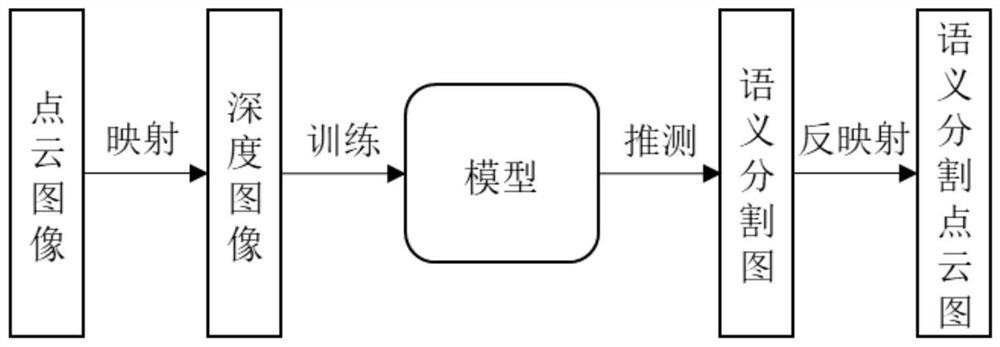
[0048] Such as figure 1 As shown, among them, the lidar point cloud is first mapped to a depth map, and the depth map is input into the model for speculation to obtain a semantic segmentation map. Finally, the semantic segmentation map is mapped to a semantic segmentation point cloud map.
[0049] 2 The design and principle of each module:
[0050] 2.1 Spherical mapping principle:
[0051] First, each point p of the lidar radar i =(x, y, z), from the spherical coordinate system to the image coordinate system, the present invention proposes the following formula:
[0052]
[0053] Where (u, v) represents the image coordinates, Indicates the height and width of the distance image representation after mapping, f=f in the formula up +f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com