Multi-degree-of-freedom upper limb flexible assistance exoskeleton
An exoskeleton and degree-of-freedom technology, applied in passive exercise equipment, physical therapy, etc., can solve the problem of reducing rehabilitation effect, reducing wearing comfort, not taking into account human shoulder blade lifting, falling shoulder joint internal rotation and external rotation, etc. degrees of freedom etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
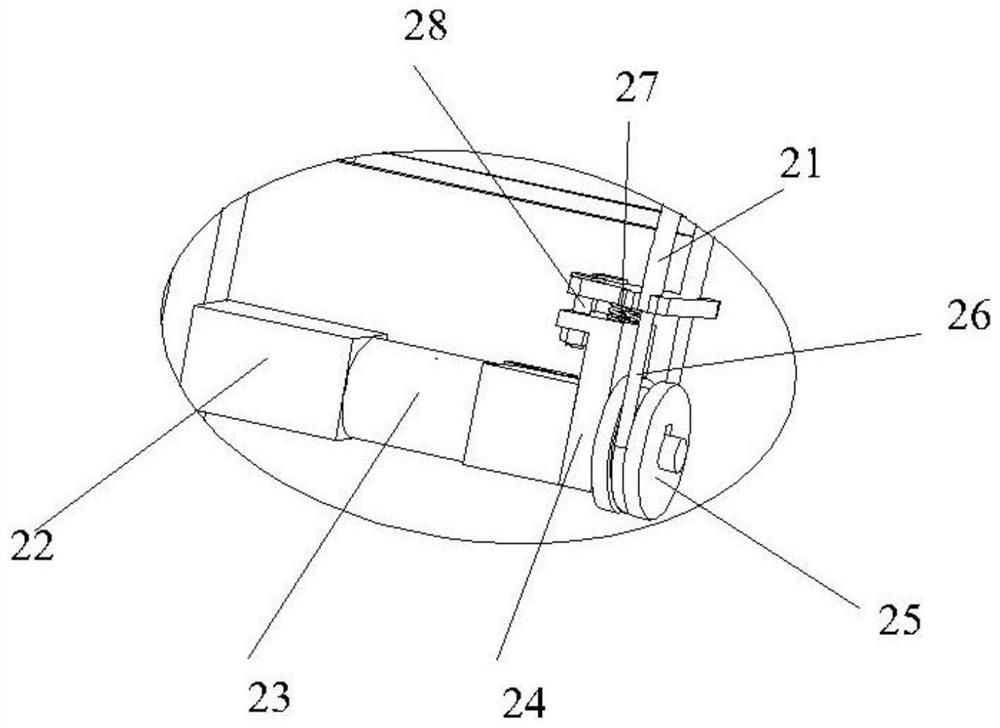
[0117] as attached Figure 15 And attached Figure 16 As shown, in this embodiment, the drive module further includes a Bowden wire 29, and the Bowden wire 29 includes a Bowden wire sheath 292 and a Bowden wire core 291, and the Bowden wire sheath 292 in this embodiment is equivalent to that of Embodiment 1 In the casing, the Bowden wire core 291 is equivalent to the steel wire rope in the first embodiment. Specifically, the Bowden wire core 291 is wound on the driving wheel 25, and then the two ends of the Bowden wire core 291 are drawn out and passed through The Bowden wire sleeve 292 is fixed on the second longitudinal rotating member 513, the second vertical rotating member 503, the first axial rotating member 504, the second axial rotating member 64, the third vertical rotating member 71 or the third shaft On the rotating part 81, the two ends of the Bowden wire sheath 292 are fixedly connected to the fixed block 9 and the drive mounting plate 24 respectively, so that wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com