Multi-target identification tracking resolving method
A mark recognition and target technology, applied in computing, image data processing, instruments, etc., can solve the problems of precision deviation, cumbersome operation, and inability to realize real-time tracking measurement and calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0062] like Figure 3a As shown, the two targets are respectively set on the docking surface of the two docking cabins placed on the fixed frame vehicle and the parallel platform, and the docking cabin on the parallel platform is used as the adjustment mobile end. The two targets are arranged side by side, and the planes of the two targets are parallel to the axes of the respective docking cabins.
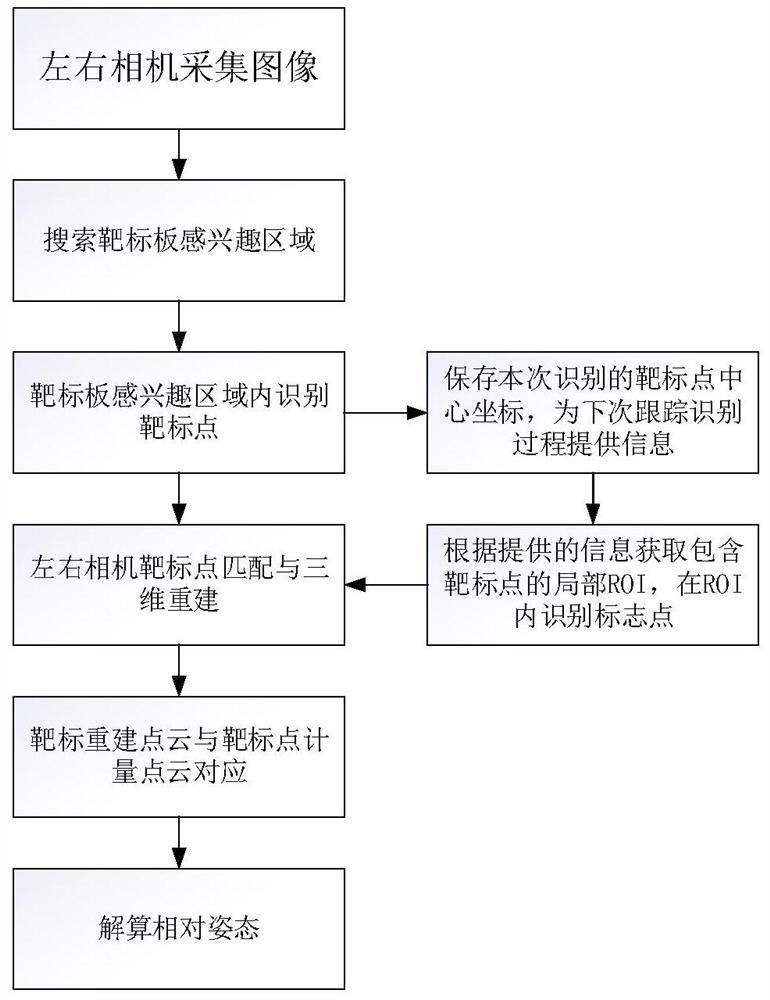
[0063] like figure 1 As shown, a kind of multi-target identification tracking solution method of the present invention comprises the following steps:
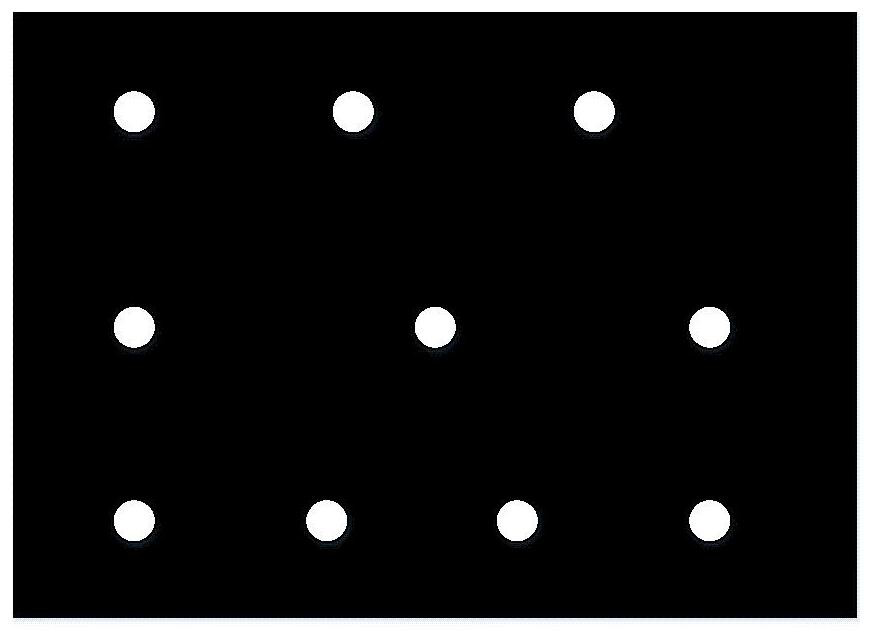
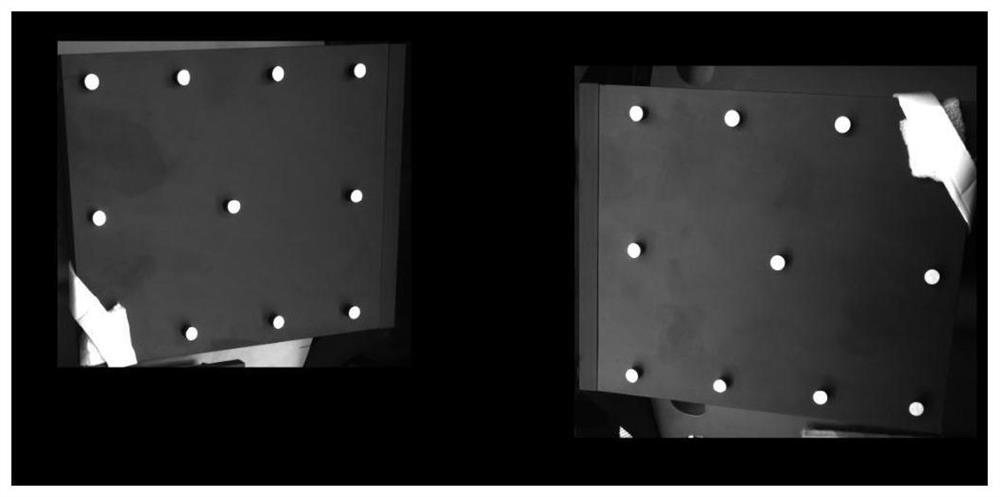
[0064] Install the target, the left and right cameras collect images (including two targets), and automatically locate the region of interest on the target plate on the left and right images;
[0065] The left and right images respectively extract and screen the mark points of the left and right ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com