Mobile robot path planning method and system based on improved RRT algorithm
A mobile robot, path planning technology, applied in the direction of control/regulation system, instrument, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0101] The mobile robot path planning method based on the improved RRT algorithm of the present invention, the method is to add a convergence factor on the basis of the RRT algorithm to improve the selection of the growth point and the exploration point of the extended tree, so as to achieve the purpose of improving the convergence speed of the algorithm; The length adjustment is used to avoid the local minimum value of the extended tree during path planning; then the planned mobile robot path is smoothed so that the path length becomes shorter and tends to the optimal path; the details are as follows:
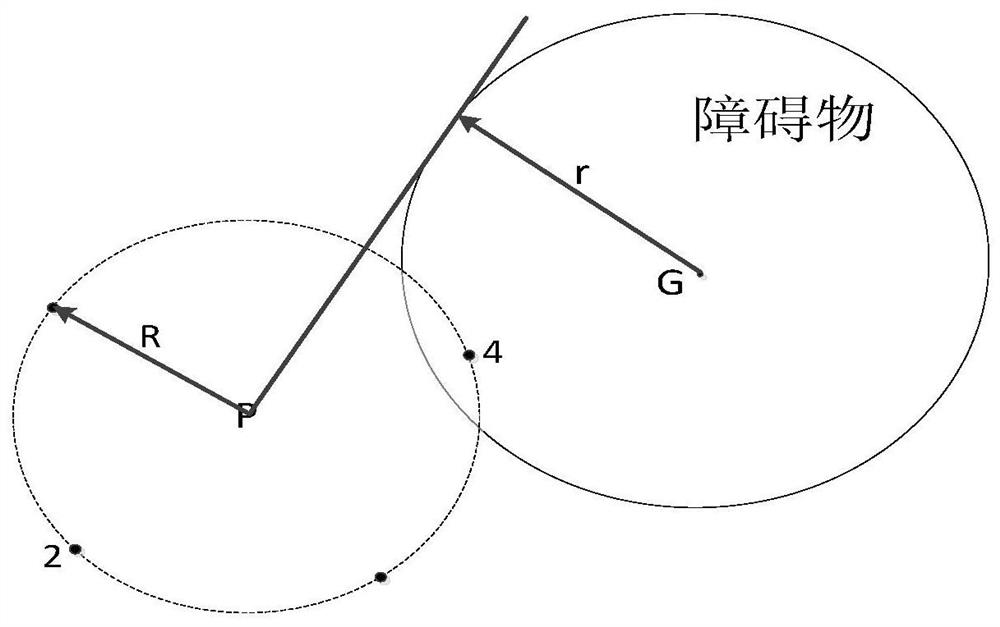
[0102] S1. Adding convergence factor: The classic RRT algorithm samples in many places that have no exploration value, and the expansion method is average, the real-time performance is poor, and the path quality is not high. After analysis, it is found that the root cause of the above defects of the RRT algorithm is that the random points are randomly generated in the whole spa...
Embodiment 2
[0152] The mobile robot path planning system based on the improved RRT algorithm of the present invention, the system includes,
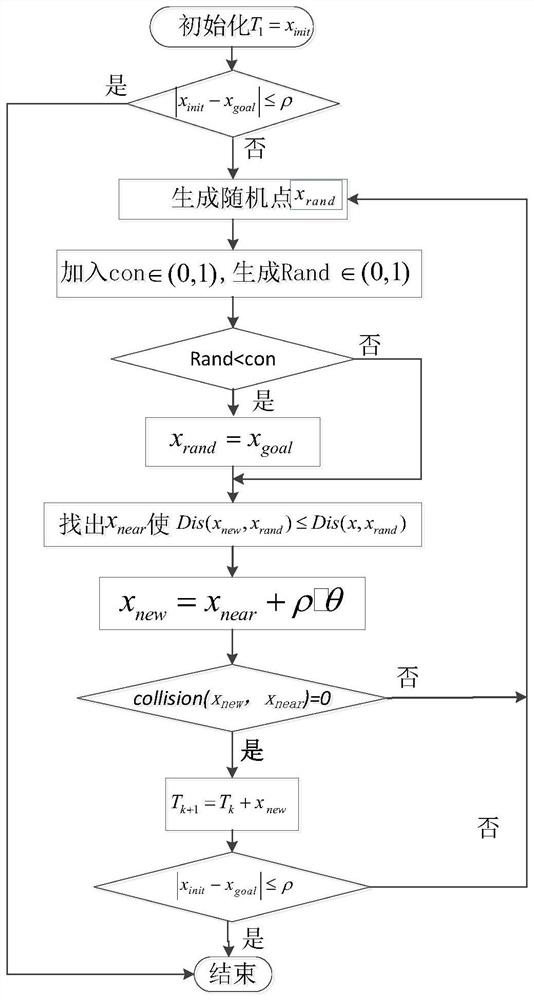
[0153] The convergence factor addition unit is used to add the convergence factor on the basis of the RRT algorithm to improve the selection of the growth point and the exploration point of the expansion tree, so as to improve the convergence speed of the algorithm; the convergence factor addition unit is to add the convergence factor con to the sampling strategy ; The specific working process is as follows:
[0154] (1), initialize T 1 =x init ; where x init represents the initial point;
[0155] (2), judge whether |x init -x goal |≤ρ: where, x goal Indicates the target point;
[0156] ①, if yes, jump to step (12);
[0157] ②, if not, then perform step (3) in the next step;
[0158] (3), generate a random point x rand ;
[0159] (4), given a convergence factor parameter con, con∈(0,1), generate a random number rand, rand∈(0,1);
[0160]...
Embodiment 3
[0189] An embodiment of the present invention also provides an electronic device, including: a memory and at least one processor;
[0190] Wherein, the memory stores computer-executable instructions;
[0191] The at least one processor executes the computer-executed instructions stored in the memory, so that the at least one processor executes the mobile robot path planning method based on the improved RRT algorithm as in any embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com