Robot servo motor gain parameter control method and system
A gain parameter, servo motor technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of easily affected accuracy, difficult design, complex monitoring, etc., to reduce difficulty and cost, ensure stability, obtain Easy and accurate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
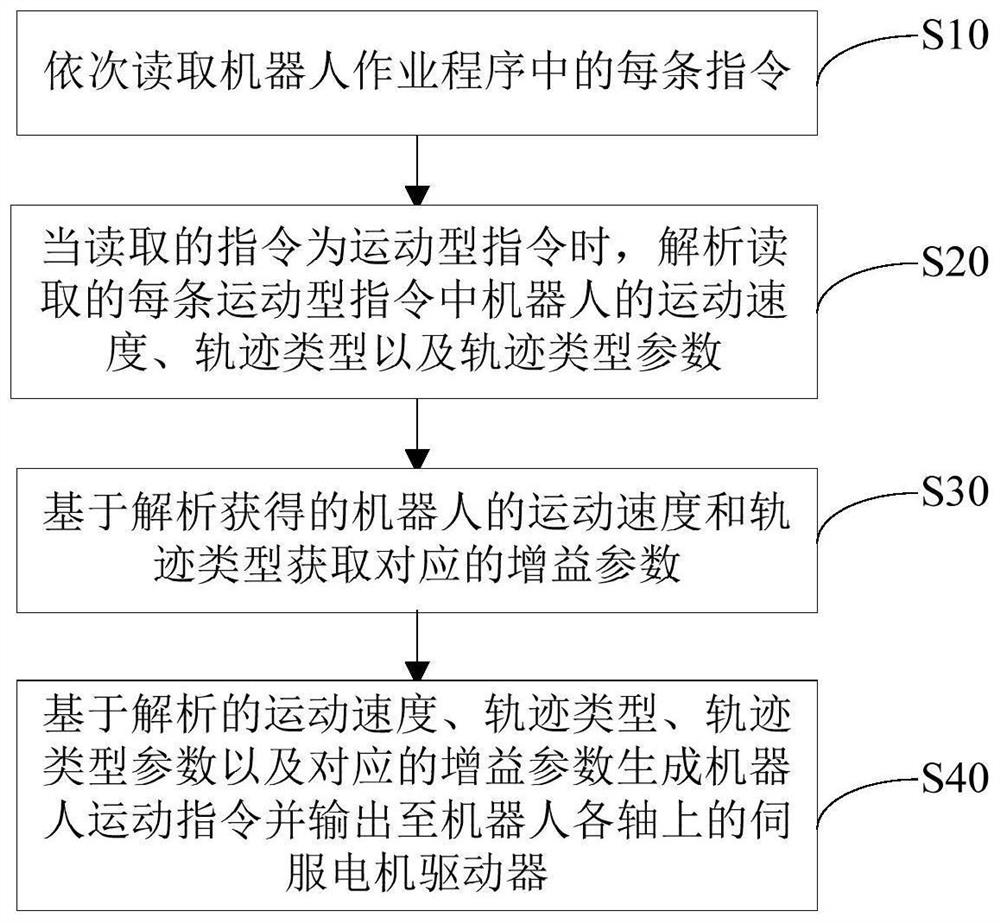
[0022] The servo motor gain parameter control method provided in this embodiment includes sequentially reading each instruction in the robot operation program (step S10). When the read instruction is a movement instruction, the movement speed, trajectory type and trajectory type parameters of the robot in each movement instruction read are analyzed (step S20). Acquiring corresponding gain parameters based on the motion speed and trajectory type of the robot obtained through analysis (step S30). Based on the analyzed motion speed, trajectory type, trajectory type parameters and corresponding gain parameters, robot motion instructions are generated and output to servo motor drivers on each axis of the robot (step S40).
[0023] In the servo motor gain parameter control method provided in this implementation, the acquisition of the gain parameter in step S30 is based on the analysis of the motion speed and trajectory type in each motion instruction read in step S20. This setting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com