Four-rotor aircraft sliding mode control method based on nonlinear disturbance observer
A quadrotor aircraft and disturbance observer technology, applied in non-electric variable control, vehicle position/route/altitude control, attitude control, etc., can solve problems such as singular phenomena
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
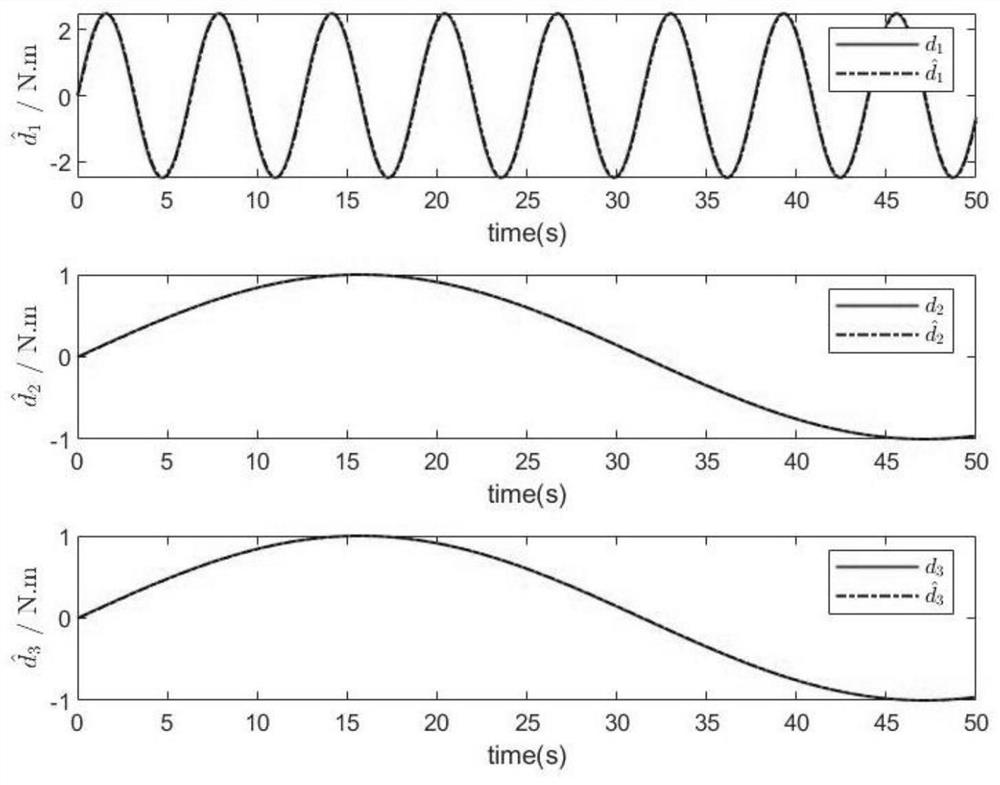
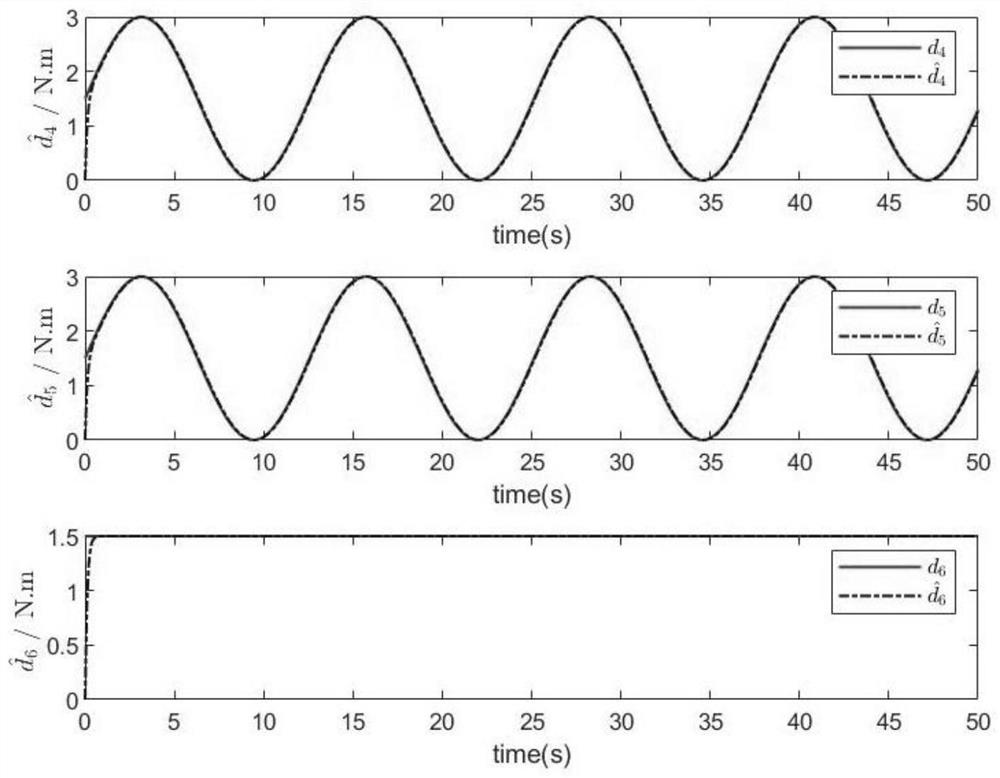
[0102] The specific embodiment of the present invention will be further described in detail in conjunction with the accompanying drawings. In order that those of ordinary skill in the art can better understand the implementation of the present invention, the present invention also provides the simulation verification results of the control method using Matlab2018a software.
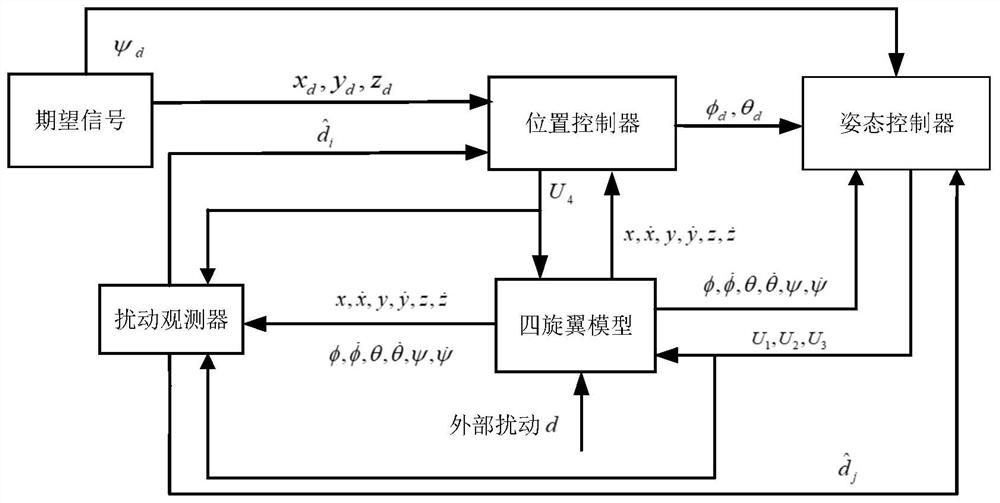
[0103] Such as figure 1 As shown, when the quadrotor UAV is affected by external disturbances, the disturbance is estimated in real time by establishing a nonlinear disturbance observer, and the attitude and position subsystem controllers are further designed using the disturbance estimation information, so that the system is in the attitude controller and Under the control of the position controller, the target instruction is still tracked. The present embodiment is a sliding mode control method for a quadrotor aircraft based on a nonlinear disturbance observer, comprising the following steps:
[0104]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com