


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Six-axis cooperative robot development platform based on rapid control prototyping system
A prototype system and rapid control technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of difficult writing of control codes and difficult implementation of advanced algorithms, and achieve high-precision control, fast motion control, and reduced effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
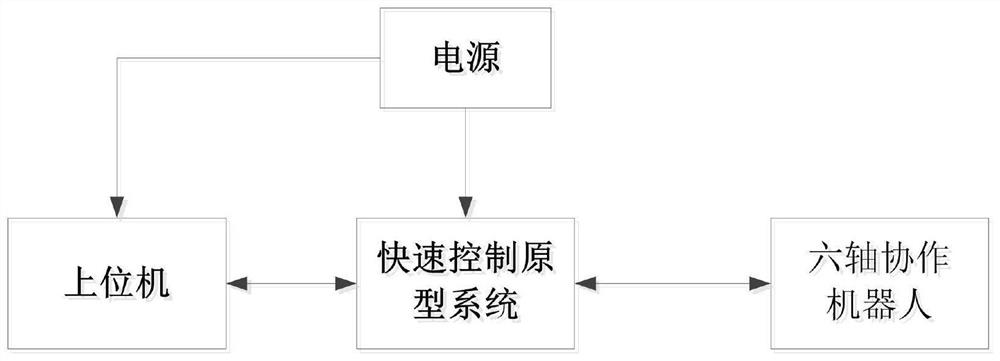
[0046] Such as figure 1 As shown, a six-axis collaborative robot development platform based on rapid control prototyping system, including:
[0047] The upper computer adopts a PC, and the development software is loaded on the PC; the upper computer is used to observe and display the real-time information of the six-axis collaborative robot, input control instructions and adjust parameters online; the development software loaded on the PC is embedded by MATLAB / Simulink and CCS Compiler and other tool software, these tool software combined with the function of automatic code generation can help people with poor programming foundation to complete the development of various control algorithms in a short time.
[0048] Power supply, providing AC 220V power supply for the development system of the upper computer, and DC 48V power supply for the rapid control prototype system;
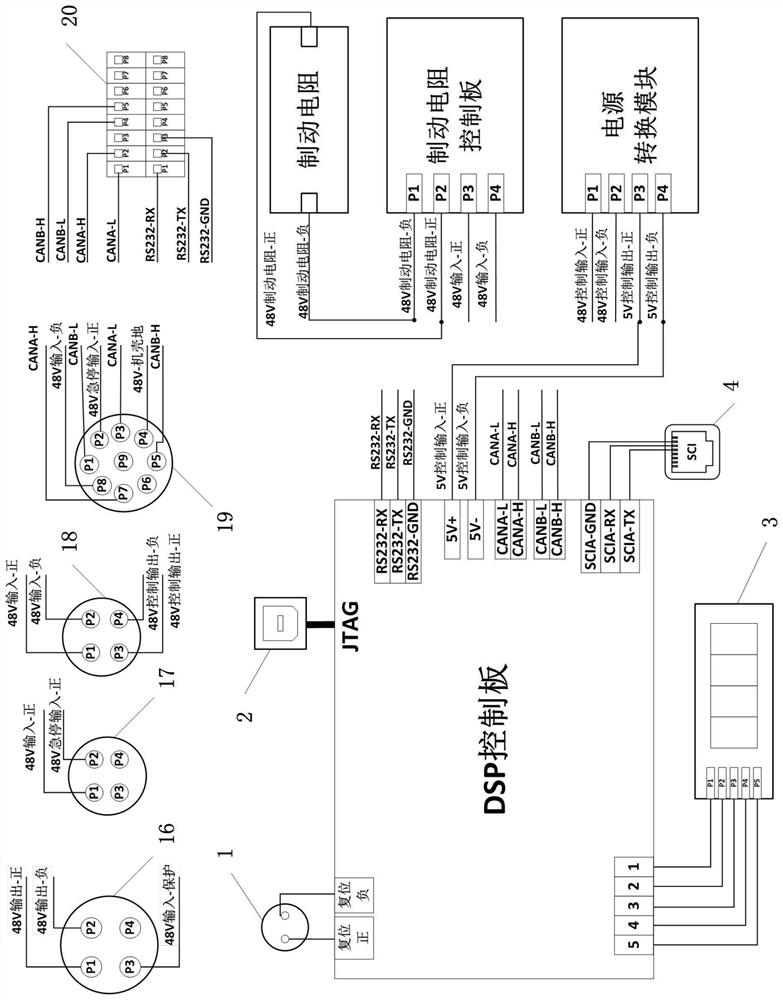
[0049] The rapid control prototype system is an open control platform for rapid control code generation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com