High-precision map road information rapid generation system and method based on space-time trajectory reconstruction
A technology of space-time trajectory and road information, which is applied in the traffic control system of road vehicles, traffic control system, road network navigator, etc., can solve the problems of not being able to reflect the special situation of the road surface in time, and the process of drawing diversion high-precision maps is complicated.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
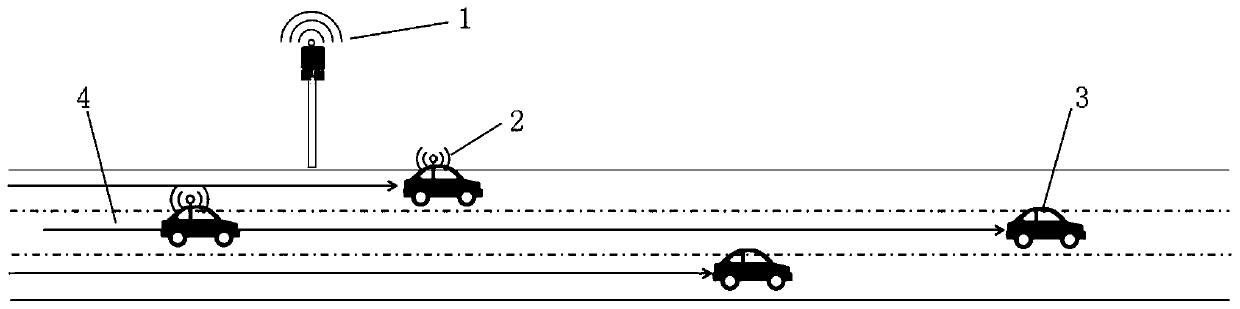
[0051]This embodiment discloses a high-precision map road information rapid generation system based on spatio-temporal trajectory reconstruction. The system includes: a trajectory reconstruction module, a lane determination module, a lane separation module, a lane boundary line drawing module, and a multi-data synthesis and fusion module. The trajectory reconstruction module uses the roadside sensing unit 1 to collect dynamic information, road condition information, feature information, traffic status information, climate information, and various abnormal event information of all types of vehicles driving on the road, and uses the vehicle-mounted unit 2 to dynamically obtain them in real time. Vehicle location information, road condition information around itself and location information relative to the vehicle, environmental information, marking information and location information relative to the vehicle, event information that endangers the safe driving of the vehicle, road s...
Embodiment 2
[0059] This embodiment discloses a method for quickly generating road information based on the reconstruction of high-precision maps based on spatio-temporal trajectories. The method is as follows:
[0060] S1. Perform spatiotemporal trajectory reconstruction, use the vehicle travel path and road surface state information collected by the roadside sensing unit 1 and the vehicle unit 2 to perform reverse spatiotemporal trajectory reconstruction, and draw the vehicle travel trajectory;
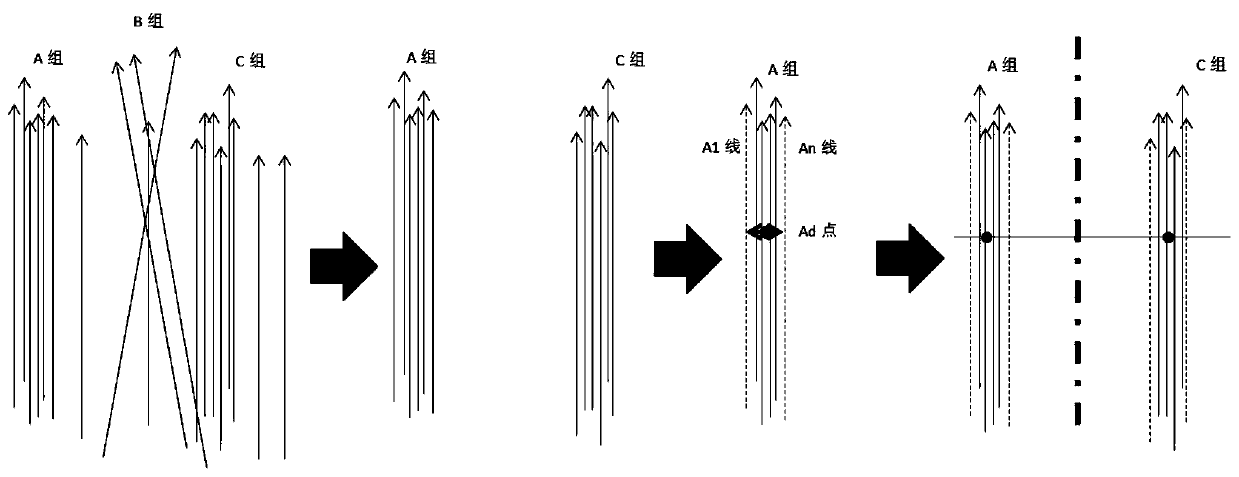
[0061] S2. Determine the lane, eliminate the interference driving track, and determine the range of a single lane;
[0062] S3, draw the lane separation line 5, determine the middle point of the track in the single lane, connect the middle points of the track on the agreed horizontal line of the adjacent single lanes, get the position of the middle point of the connection line as the lane separation point, and use the lane separation point Draw a lane separation line 5 for a line whose starting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com