Humanoid robot system based on air cylinders and pneumatic muscles
A technology of humanoid robot and pneumatic muscle, which is applied in the field of bionic robot, can solve the problems of no consideration of flexibility, muscle group combination, single drive branch chain rigid-flexible combination single joint and multi-joint hybrid combined drive, etc., and achieve compact structure , good flexibility, high power/mass ratio effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
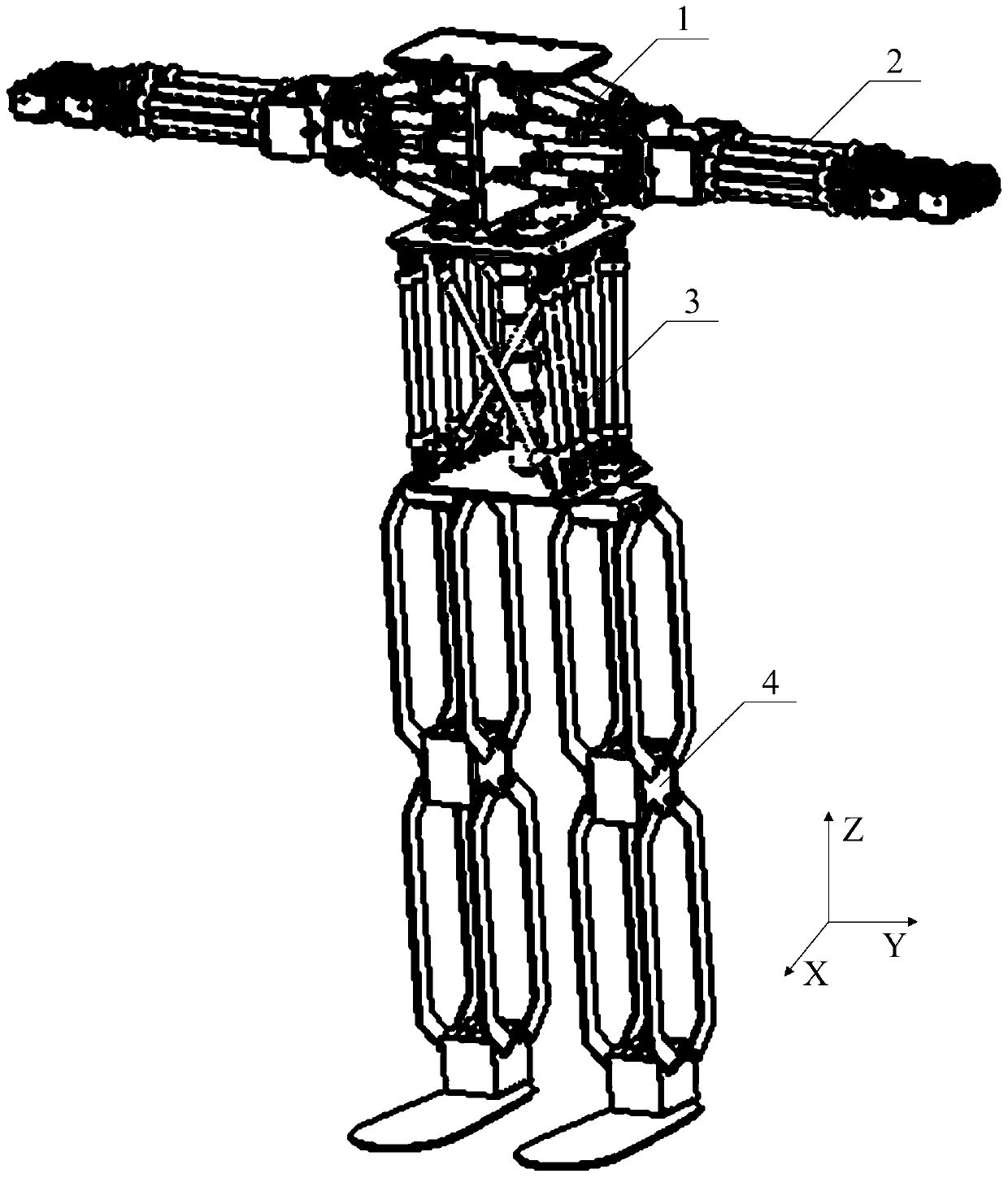
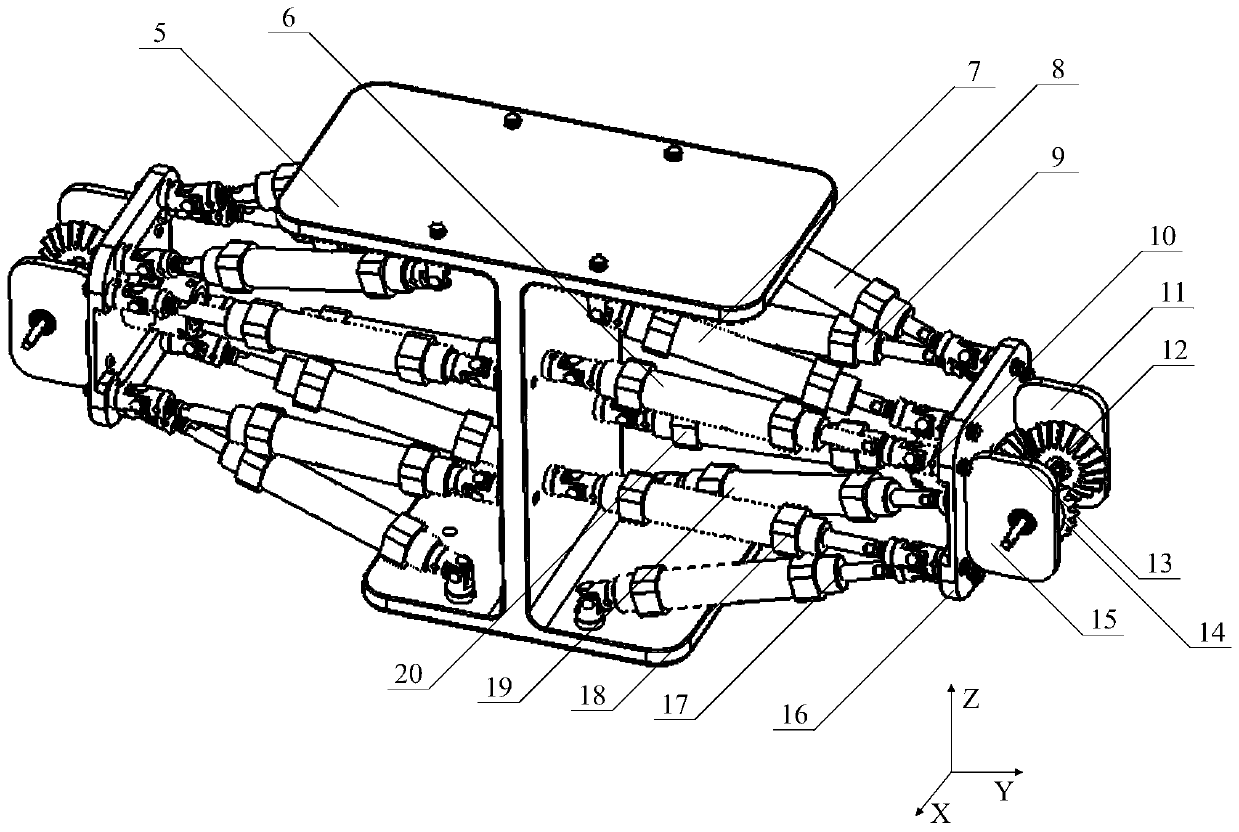
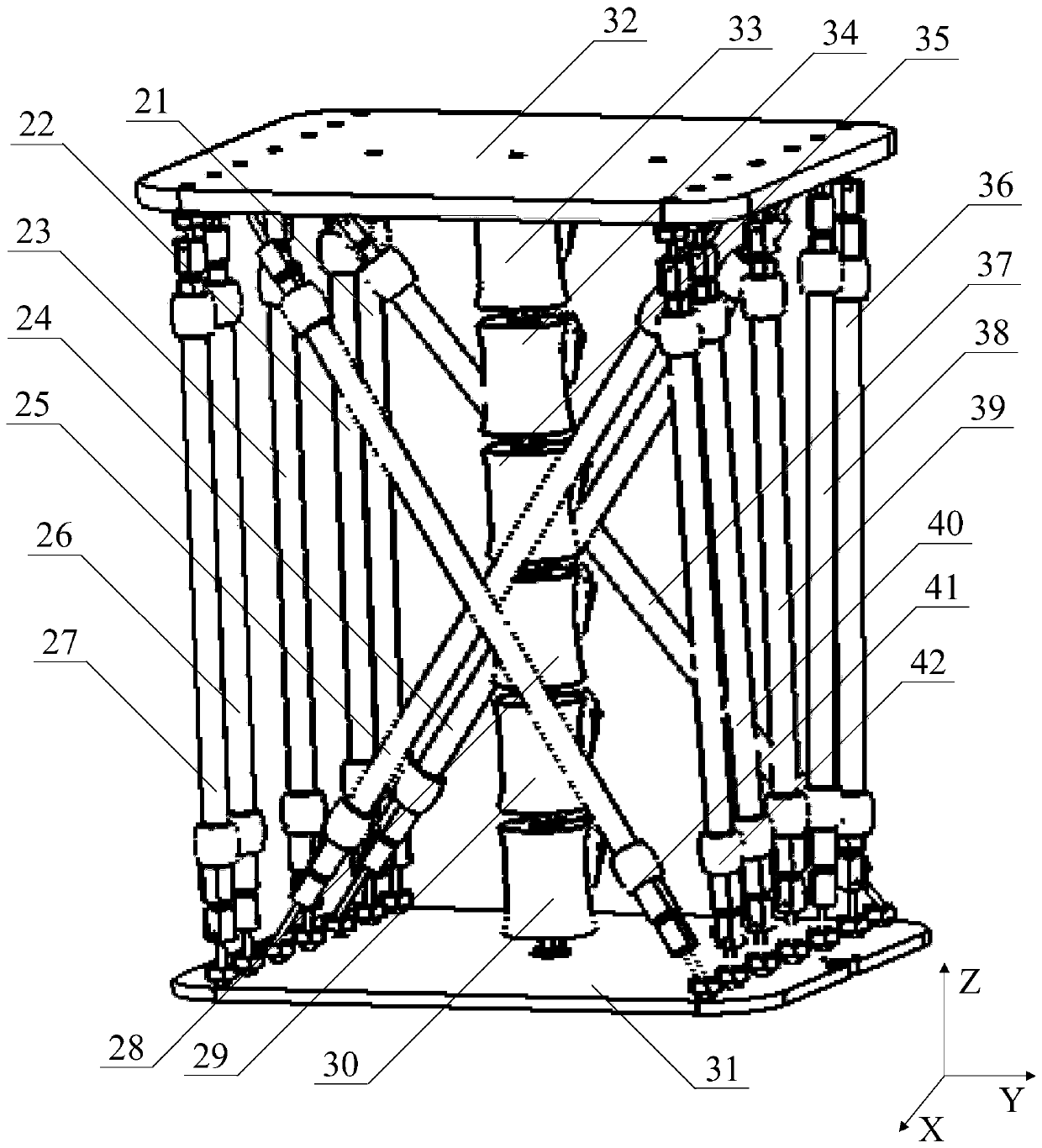
[0046] A humanoid robot system based on cylinders and pneumatic muscles, including: thoracic joint 1, two sets of upper limb joints 2 arranged as mirror images on both sides of thoracic joint 1, the lower part is fixed on the lumbar joint 3, and the lower parts of the lumbar joint 3 are mirror images of each other The lower limb joint 4 is set, and the lower limb joint 4 is respectively the left lower limb 4-1 and the right lower limb 4-2; the two sides of the chest joint fixing plate 5 of the chest joint 1 are mirror images of each other and the linear cylinder one 6, the linear cylinder two 7, the straight line cylinder Cylinder three 8, linear cylinder four 9, linear cylinder five 17, linear cylinder six 18, linear cylinder seven 19 and linear cylinder eight 20, linear cylinder two 7, linear cylinder three 8 one ends can be rotatably connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com