A Multi-cylinder Snake Robot System Based on Pneumatic Muscle
A snake-shaped robot and pneumatic muscle technology, applied in the field of bionic robots, can solve problems such as the limitation of motion range and freedom of motion, and the inability to simulate the soft and changeable body of snakes, achieving compact structure, increased joint contraction, and good flexibility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
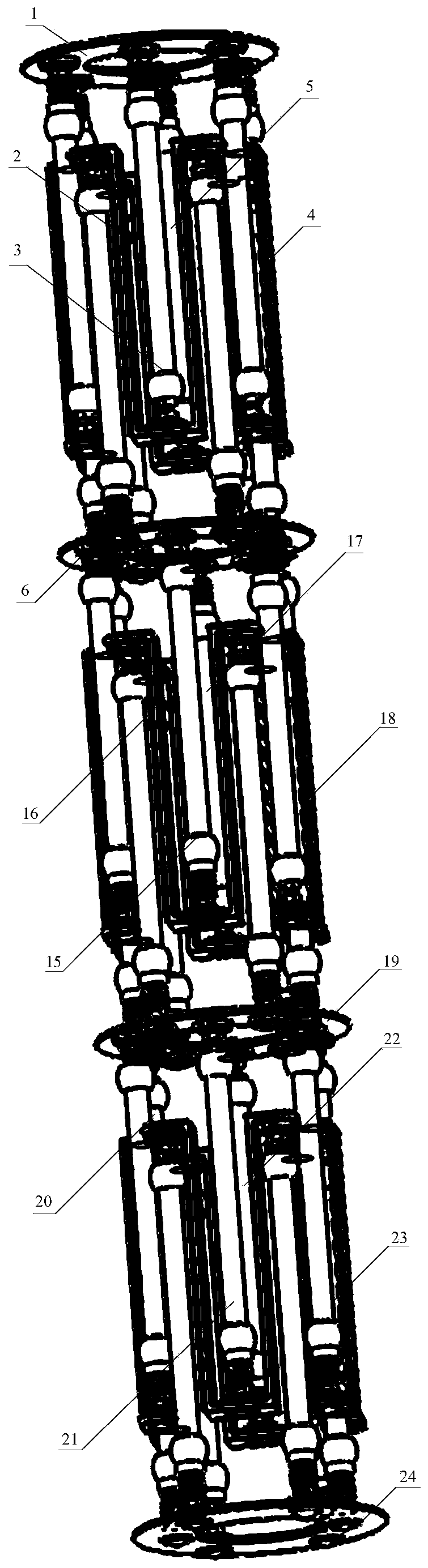
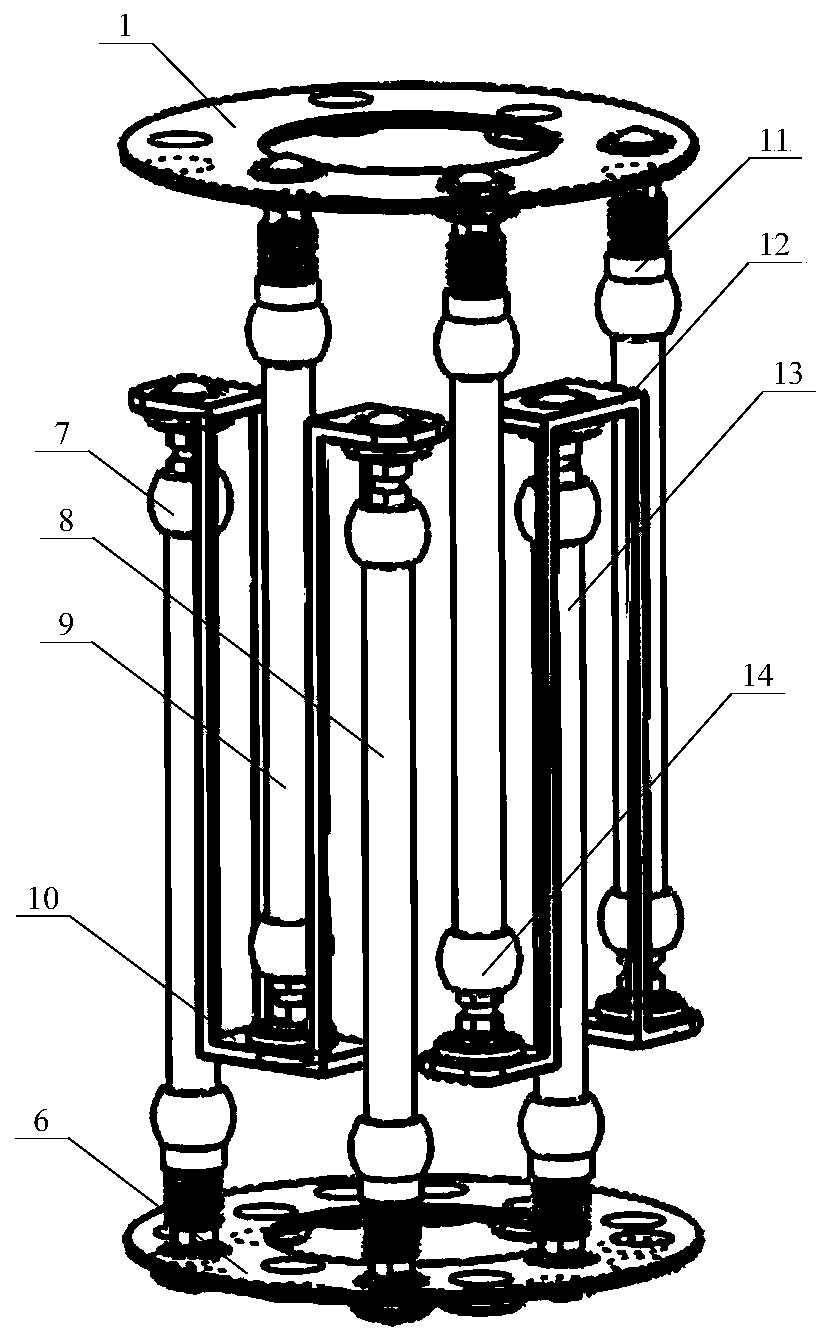
[0017] Such as Figure 1-3 As shown, the multi-cylinder serpentine robot system based on pneumatic muscles of the present invention includes: upper deck 1, multi-cylinder one 2, multi-cylinder two 3, multi-cylinder three 4, multi-cylinder four 5, lower deck 6 , Pneumatic muscle 1 7, Pneumatic muscle 2 8, Pneumatic muscle 3 9, Connector 10, Pneumatic muscle 4 11, Connector 2 12, Pneumatic muscle 5 13, Pneumatic muscle 6 14, Multi-cylinder 5 15, Multi-cylinder Six 16, multi-cylinder seven 17, multi-cylinder eight 18, third layer 19, multi-cylinder nine 20, multi-cylinder ten 21, multi-cylinder eleven 22, multi-cylinder twelve 23, fourth floor plate 24.
[0018] Wherein, the two ends of multi-cylinder body one 2, multi-cylinder body two 3, multi-cylinder body three 4, and multi-cylinder body four 5 are rotatably connected with first layer plate 1 and second layer plate 6 respectively, and multi-cylinder body body one 2, The structure of multi-cylinder body three 4 is completely...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com