Redundant robot inverse kinematics solving method and device and redundant robot
A technology of inverse kinematics and robotics, applied in the field of redundant robots, can solve problems such as uncontrollable results, robot joint angles that easily exceed the working range, and robot shaking, etc., to achieve intuitive understanding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] Please refer to image 3 , this embodiment proposes a redundant robot inverse kinematics solution method, combining the redundant robot's null space and using energy as a criterion, it can well improve the shortcomings of the inverse kinematics solution method in the prior art.
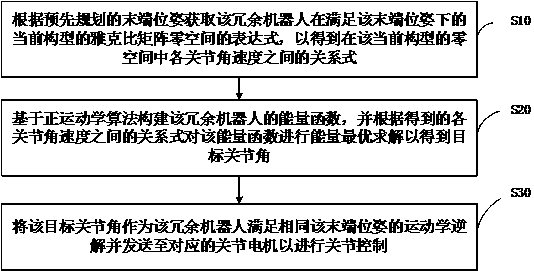
[0056] Such as image 3 As shown, the redundant robot inverse kinematics solution method mainly includes the following steps:
[0057] Step S10, according to the pre-planned end pose, obtain the expression of the null space of the Jacobian matrix of the redundant robot in the current configuration satisfying the end pose, so as to obtain the angular velocity of each joint in the null space of the current configuration relationship between.
[0058] After a desired end pose of the redundant robot is given, a set of joint angles is obtained by using inverse kinematics solution and sent to the joint motors for joint control, so that the redundant robot performs the corresponding motion. In this...
Embodiment 2
[0082] Please refer to image 3 , based on the method of the above-mentioned embodiment 1, this embodiment proposes a redundant robot inverse kinematics solution method, for the energy function of the redundant robot constructed based on the forward kinematics algorithm in the above step S20, exemplary, the energy function It may include but not limited to gravitational potential energy function, gravity compensation function, repulsion potential energy function, etc. Specifically, the energy function can be constructed according to actual needs.
[0083] In one embodiment, since each joint is subjected to the action of gravity during space movement, gravitational potential energy will be generated. Exemplarily, the energy function is a gravitational potential energy function. For the construction of the gravitational potential energy function, such as Figure 5 As shown, it mainly includes the following sub-steps:
[0084] In sub-step S210, the coordinate system pose of ea...
Embodiment 3
[0103] Please refer to Figure 6 , based on the method of the above-mentioned embodiment 1, this embodiment proposes a redundant robot inverse kinematics solving device 10, including:
[0104] The null space solving module 100 is used to obtain the expression of the null space of the Jacobian matrix of the redundant robot in the current configuration satisfying the terminal pose according to the pre-planned terminal pose, so as to obtain the expression of the null space of the Jacobian matrix in the current configuration The relationship between the angular velocities of each joint in the null space of .
[0105] The energy function construction module 200 is used to construct the energy function of the redundant robot based on the forward kinematics algorithm, and perform an energy optimal solution to the energy function according to the relationship between the angular velocities of the joints to obtain the target joint angle .
[0106] The kinematics inverse solution acqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com