Ship dynamic obstacle avoidance optimization method and system in uncertain environment
A technology of dynamic obstacle avoidance and optimization method, applied in the direction of control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as failure of obstacle avoidance, and achieve the effect of ensuring absolute safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
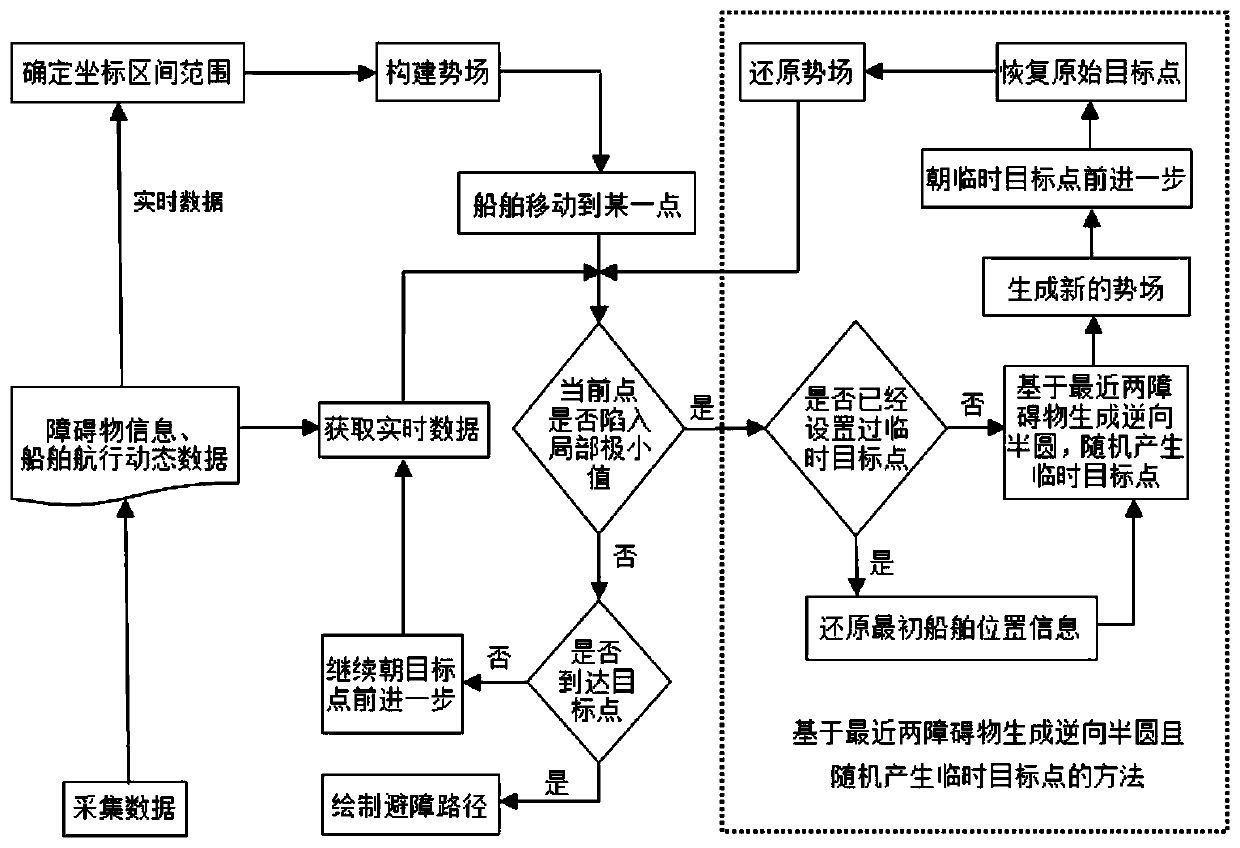
[0035] Such as image 3 As shown, the present embodiment provides a dynamic obstacle avoidance method for a ship in an uncertain environment, and its solution mainly includes the following parts:
[0036] (1) Collect data
[0037] First of all, it is necessary to collect all kinds of data required for obstacle avoidance during ship navigation in real time through various sensing devices, and store the collected data in the database. The data to be collected mainly includes: 1) information on various obstacles (including sudden obstacles) perceived during the ship’s navigation, including obstacle latitude and longitude information, range size, trajectory, etc.; dynamic data. And store all kinds of data collected in the database.
[0038] (2) Determine the range of the coordinate interval
[0039] It is used to determine the scope of the safe navigation area of the ship. Analyze the data of own ship, target point, and multiple obstacles at the current moment, coordinate c...
Embodiment 2
[0052] Another aspect of the embodiments of the present invention also provides a ship dynamic obstacle avoidance optimization system in an uncertain environment, including a judgment unit, a temporary guidance unit and a guidance unit.
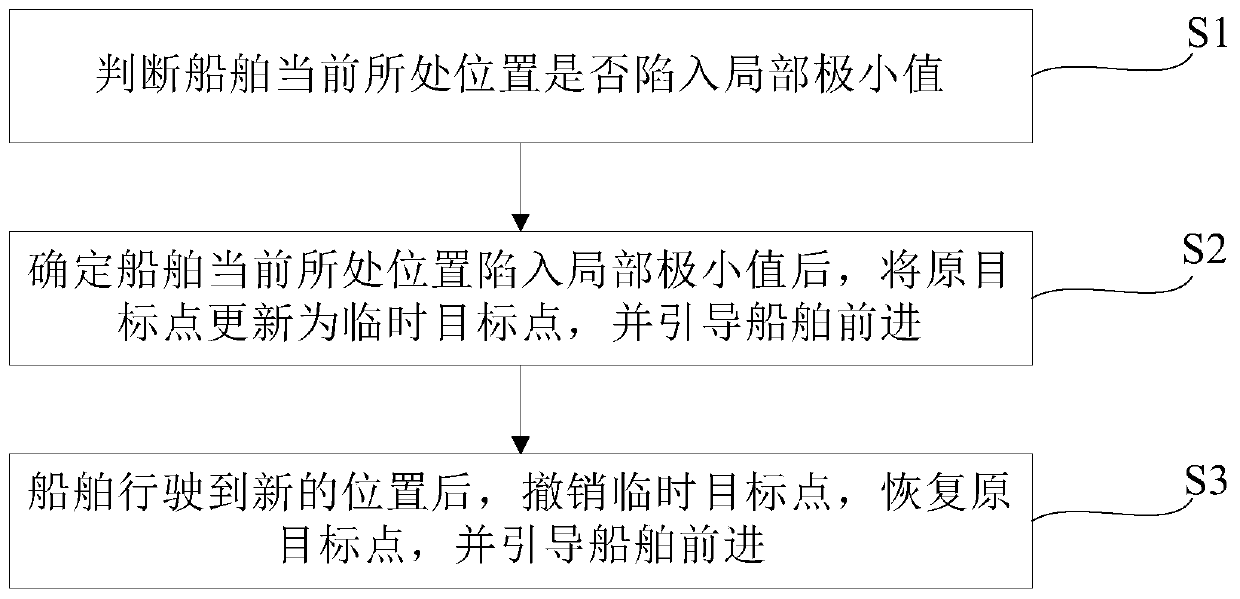
[0053] The judging unit is mainly used to judge whether the current position of the ship falls into a local minimum.
[0054] The temporary guidance unit is mainly used to update the original target point to a temporary target point after determining that the current position of the ship falls into a local minimum, and guide the ship forward. After the ship travels to a new position, cancel the temporary target point and restore the original target point. The temporary target point is obtained according to the positions of the two obstacles closest to the position of the ship. Specifically, the step of obtaining the temporary target point by the temporary guidance unit includes: taking the midpoint of the two obstacles closest to the positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com