Unmanned vehicle path tracking and obstacle avoidance method
A path tracking, unmanned vehicle technology, applied in vehicle position/route/height control, motor vehicle, non-electric variable control and other directions, can solve the problem of not considering the real-time dynamic obstacle avoidance requirements of unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
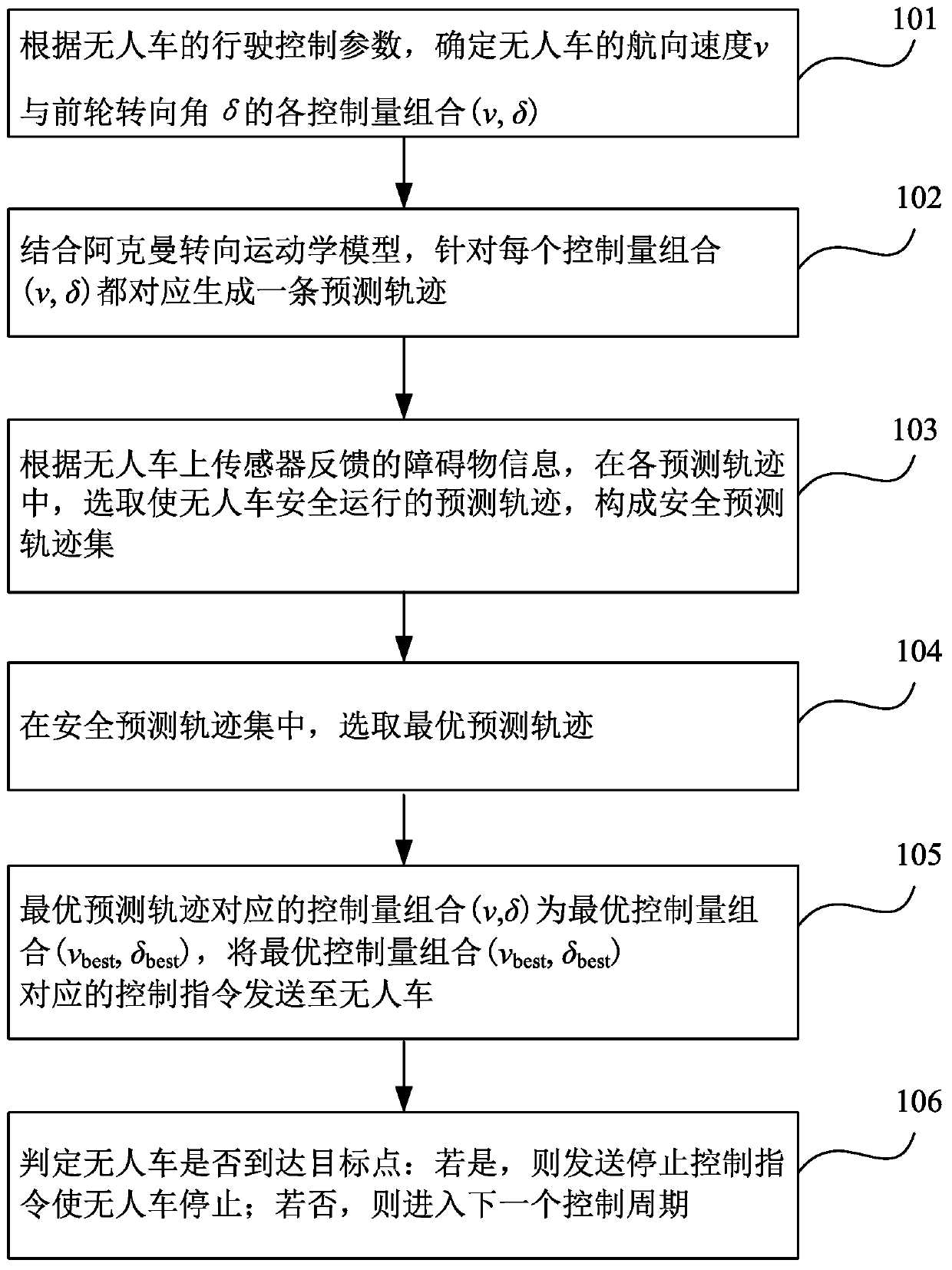
[0019] like figure 1 As shown, the unmanned vehicle path tracking and obstacle avoidance method described in the present invention includes:
[0020] For a control cycle of an unmanned vehicle, perform the following operations:
[0021] 101. According to the driving control parameters of the unmanned vehicle, determine the control variable combination (v, δ) of the heading speed v and the front wheel steering angle δ of the unmanned vehicle;
[0022] 102. Combining with the Ackerman steering kinematics model, a predicted trajectory is correspondingly generated for each control variable combination (v, δ);
[0023] 103. According to the obstacle information fed back by the sensor on the unmanned vehicle, among the pred...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com