Robot and advancing control method thereof
A robot and control module technology, applied in the direction of non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., can solve the problem of unsuitable instant manual push, deep function level, and different positions of emergency stop switch buttons and other issues, to achieve the effect of simple and feasible obstacle avoidance operation, improved user experience, and convenient and fast movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only some structures related to the present invention are shown in the drawings but not all structures.
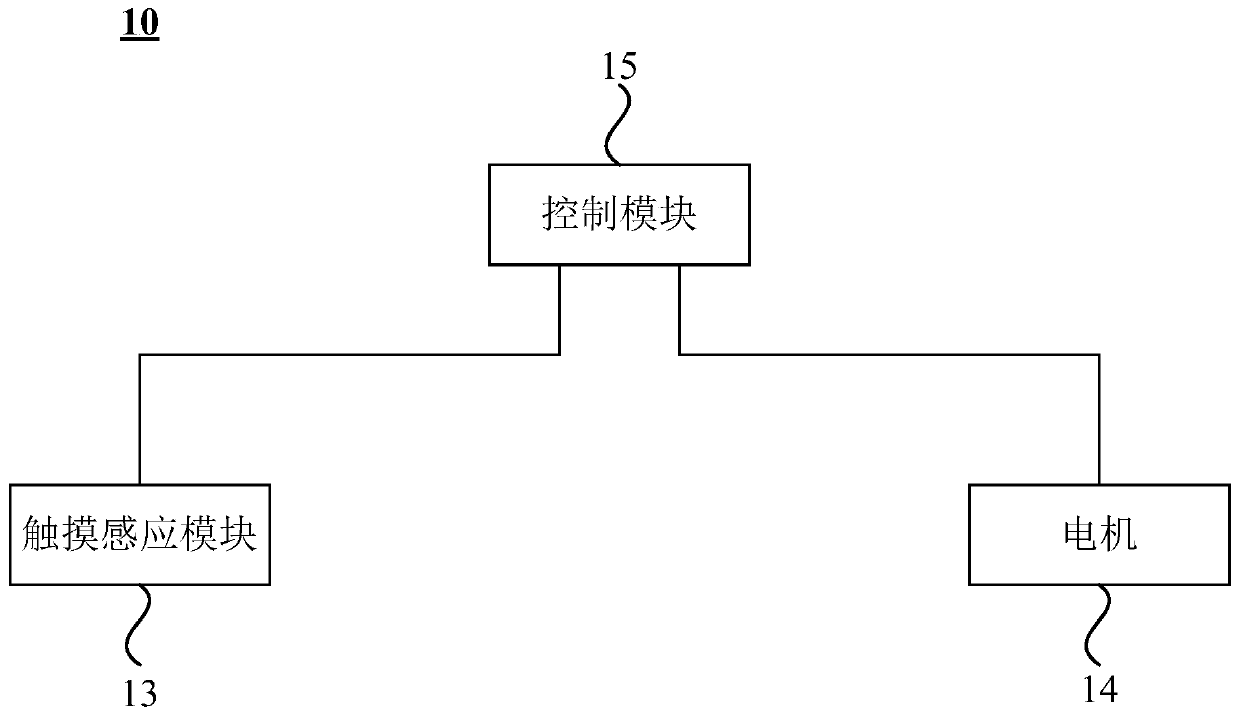
[0072] figure 1 is a schematic structural block diagram of a robot provided by an embodiment of the present invention, such as figure 1 As shown, the robot 10 provided by the embodiment of the present invention includes a touch sensing module 13, a motor 14 and a control module 15; the control module 15 is connected to the motor 14 for controlling the power on of the motor 14; the touch sensing module 13 is connected to the control module 15 for After sensing the user's touch operation, send the hand push functio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com