Coordinated control method, device and system of functional electrical stimulation and exoskeleton equipment, and storage medium
A functional electrical stimulation and coordinated control technology, applied in the field of rehabilitation training, can solve the problems of cumbersome process, large trajectory tracking error, difficult control, etc., to achieve the effect of enhancing user confidence, good training experience, and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
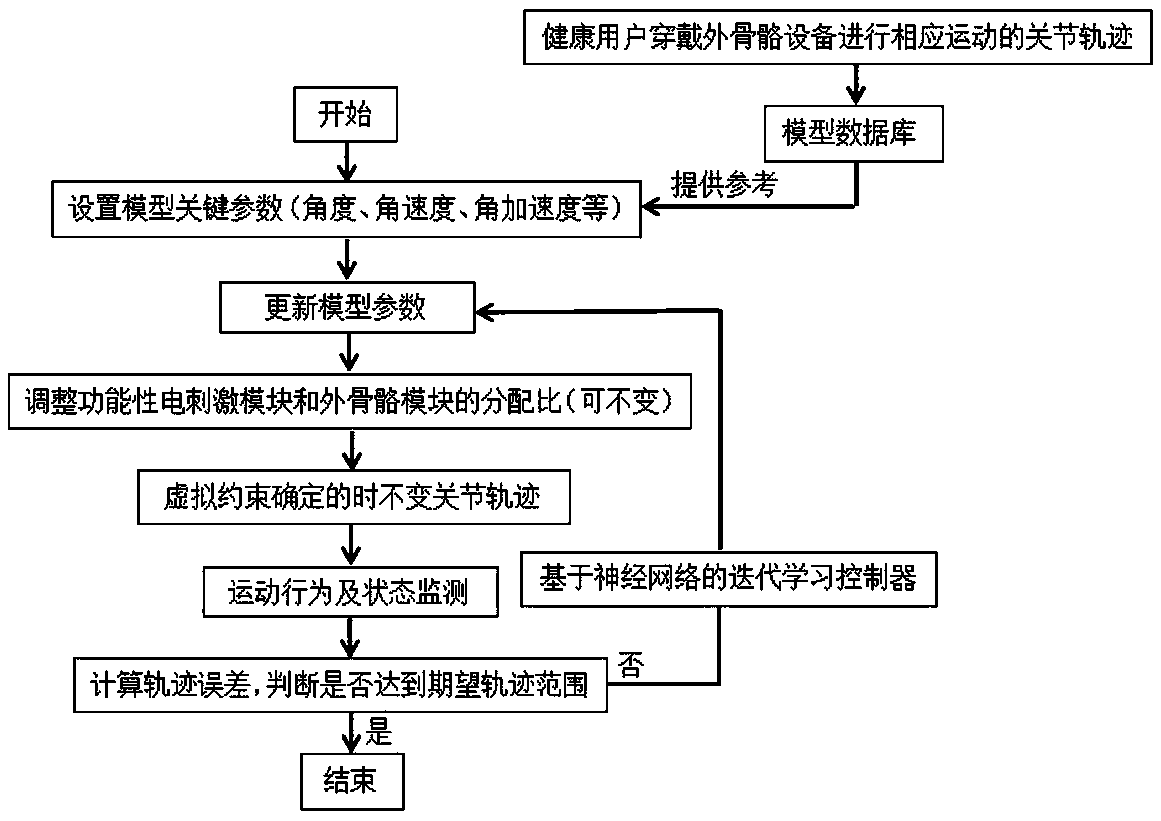
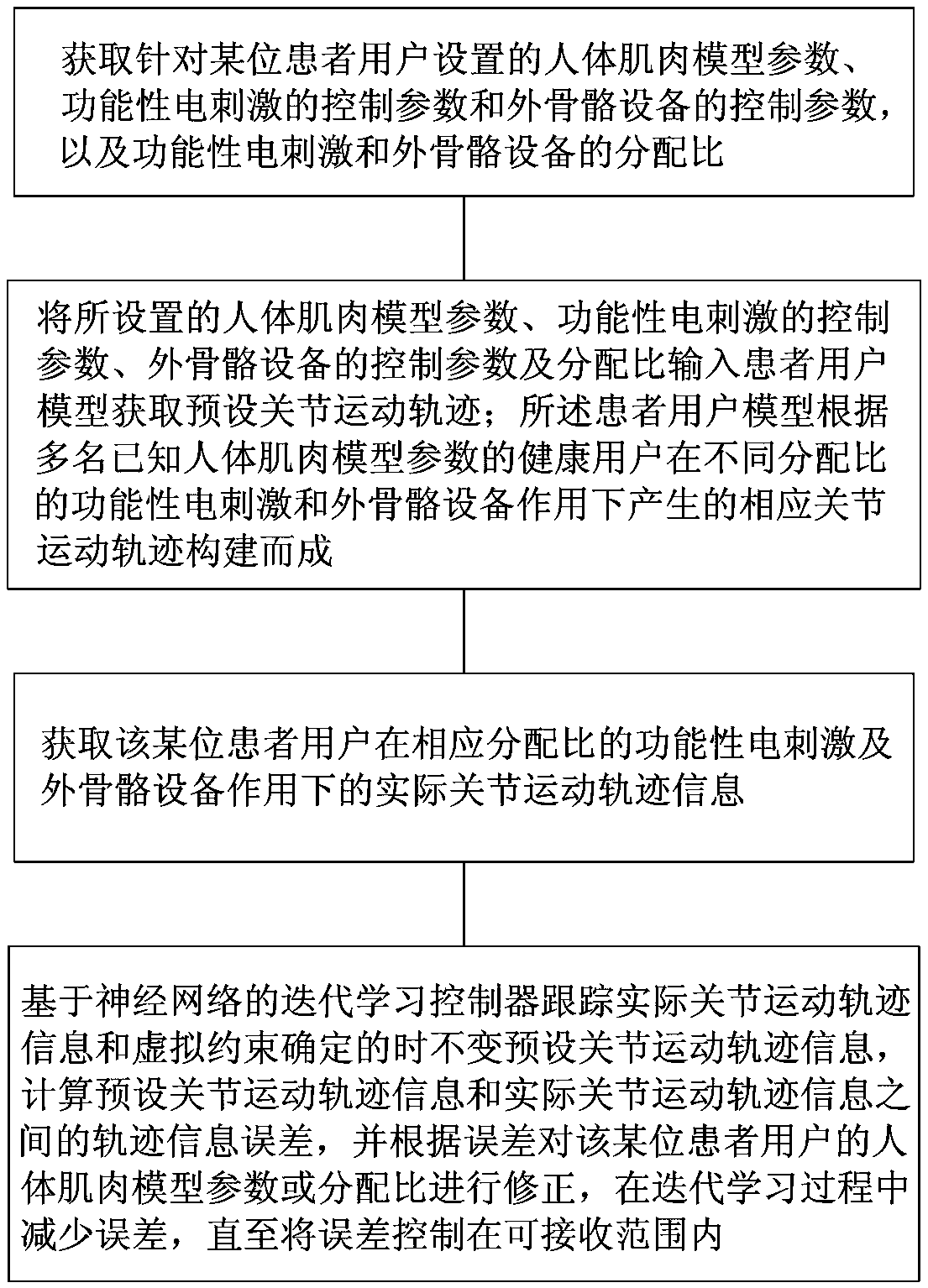
[0039] This embodiment is a coordinated control method for functional electrical stimulation and exoskeleton equipment, and the specific steps are as follows:
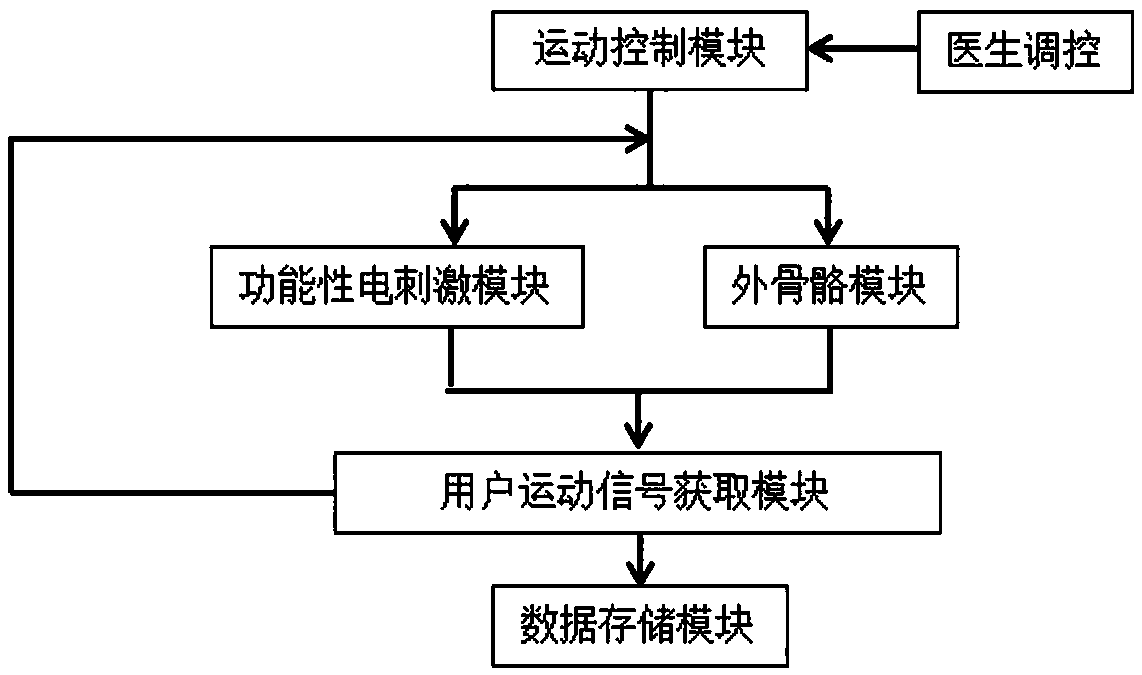
[0040]Obtain the human muscle model parameters, control parameters of functional electrical stimulation and control parameters of exoskeleton equipment set for a patient user, as well as the distribution ratio of functional electrical stimulation and exoskeleton equipment; doctors can according to the patient's muscle strength, rehabilitation stage to set the torque ratio generated by functional electrical stimulation or exoskeleton equipment, assuming that the torque generated by electrical stimulation is a, the torque generated by exoskeleton is b, and the torque generated by the patient is c (constant in a certain stage), a+b+c=1, the value range of a, b, c is 0-1, a:b is distribution ratio;
[0041] Input the set human muscle model parameters, functional electrical stimulation control parameters, exoskeleton equipm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com