Method for planning multiple collision-free air routes in same area based on A * algorithm
A same-area, collision-free technology, applied in three-dimensional position/course control, vehicle position/route/height control, advanced technology, etc., can solve the problem of unsmooth routes, many inflection points, unfavorable UAV tracking routes, etc., to achieve The effect of smoothing the route, reducing the number of turns, and ensuring availability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
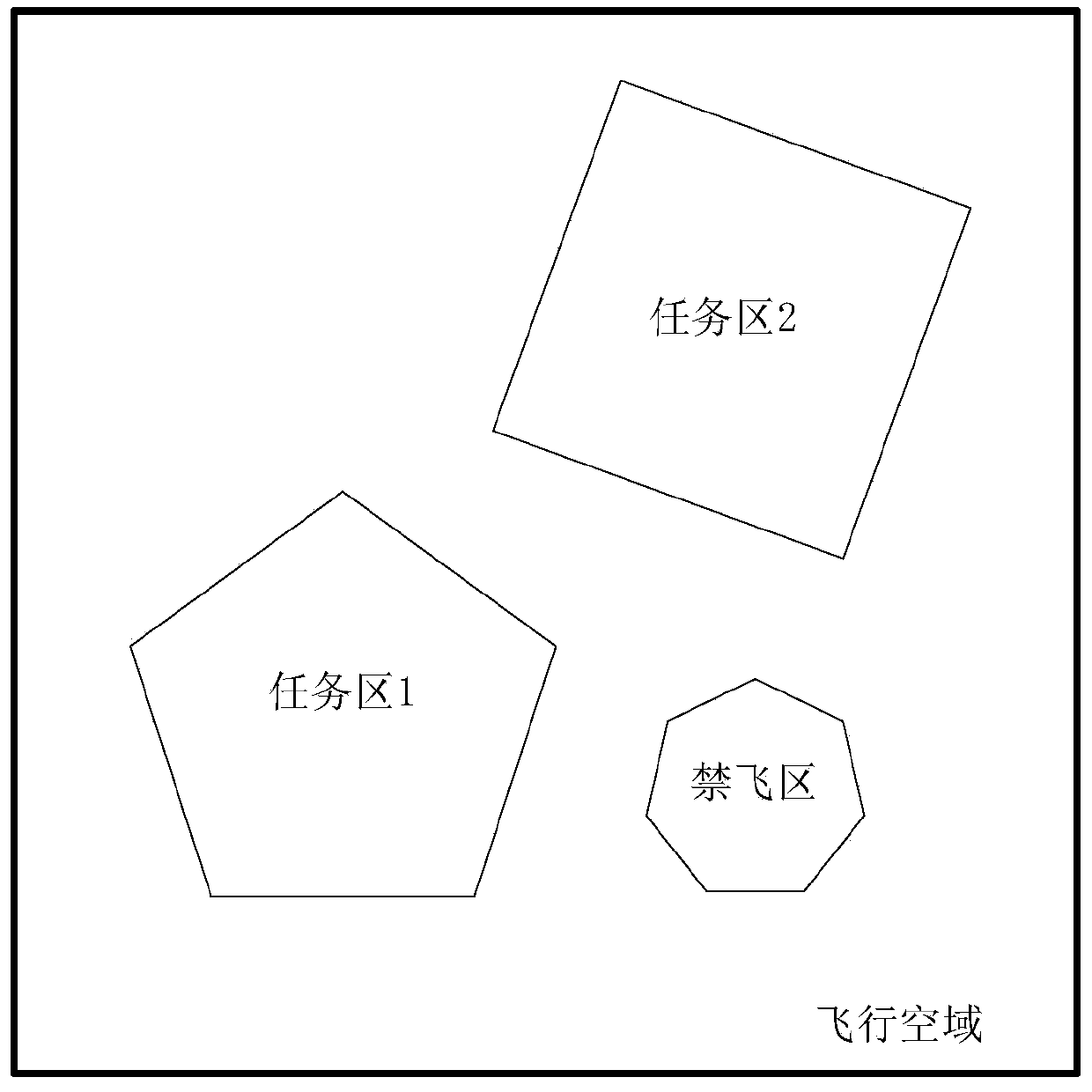
[0046] Step 1: Obtain 1 flight airspace, 1 no-fly zone and 2 mission target areas.
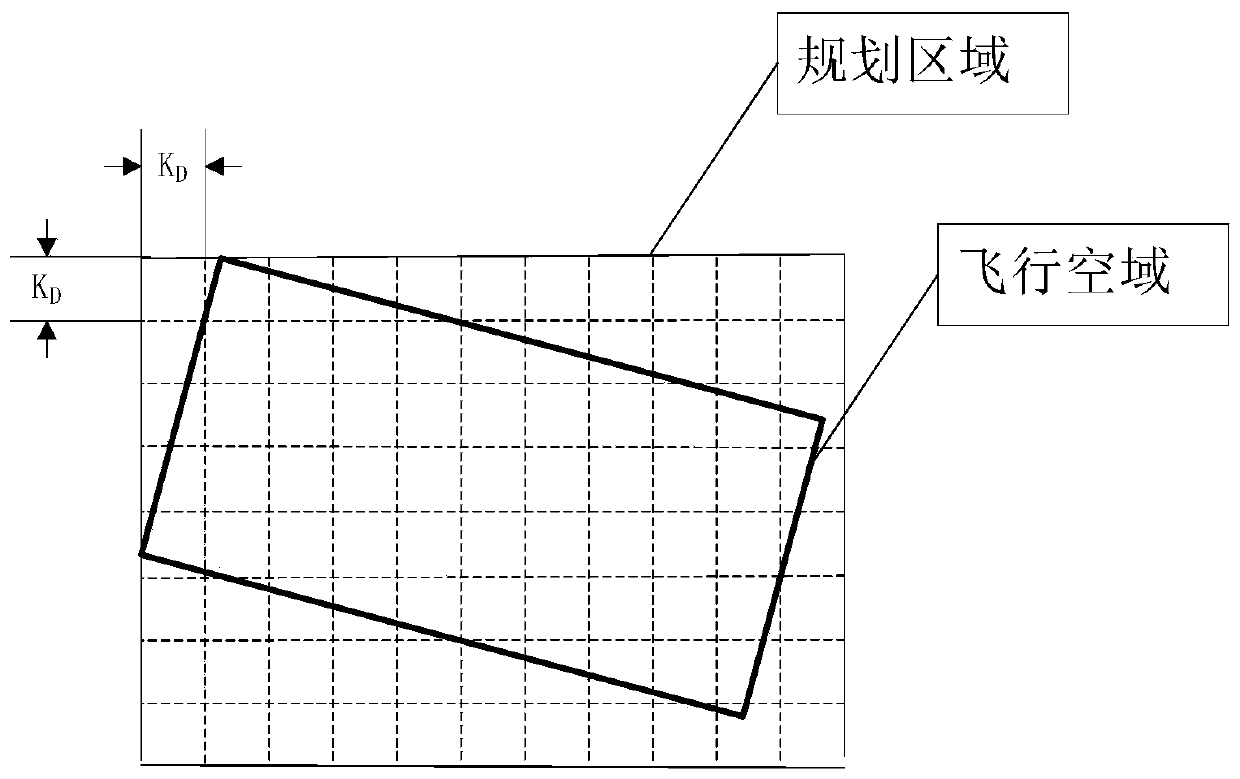
[0047] Determine the scope of the planning area according to the given flight airspace, and the planning area consists of multiple sides whose length is K D The square composition, K D The value is 800m. The scope of the planning area is the smallest circumscribed rectangular area of the flight airspace.
[0048] Step 2: Obtain the start point and end point of the route. The starting point is the take-off point of the drone, which is set to the same starting point. The smallest square grid is used as a node, and all node information is initialized to be able to pass through, and then the grids crossed by the flight airspace, no-fly zone and mission target area obtained in step 1 are respectively calculated, and the corresponding node information is set as If it cannot pass, finally calculate the grid where the start point and end point are located, and set the search start point and searc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com