Driverless vehicle local path planning method based on model prediction
A technology of unmanned vehicles and local path planning, which is applied in the direction of vehicle position/route/height control, motor vehicles, measuring devices, etc., to achieve the effect of convenient calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to more clearly illustrate the purpose, technical solutions and advantages of the present invention, the basic framework of model prediction local path planning, the processing of typical road environments in the path planning process, the simulation verification of model prediction path planning in typical road environments, etc. Several aspects will further explain the present invention. It should be understood that the specific design methods described here are only used to explain the present invention, and are not intended to limit the present invention.
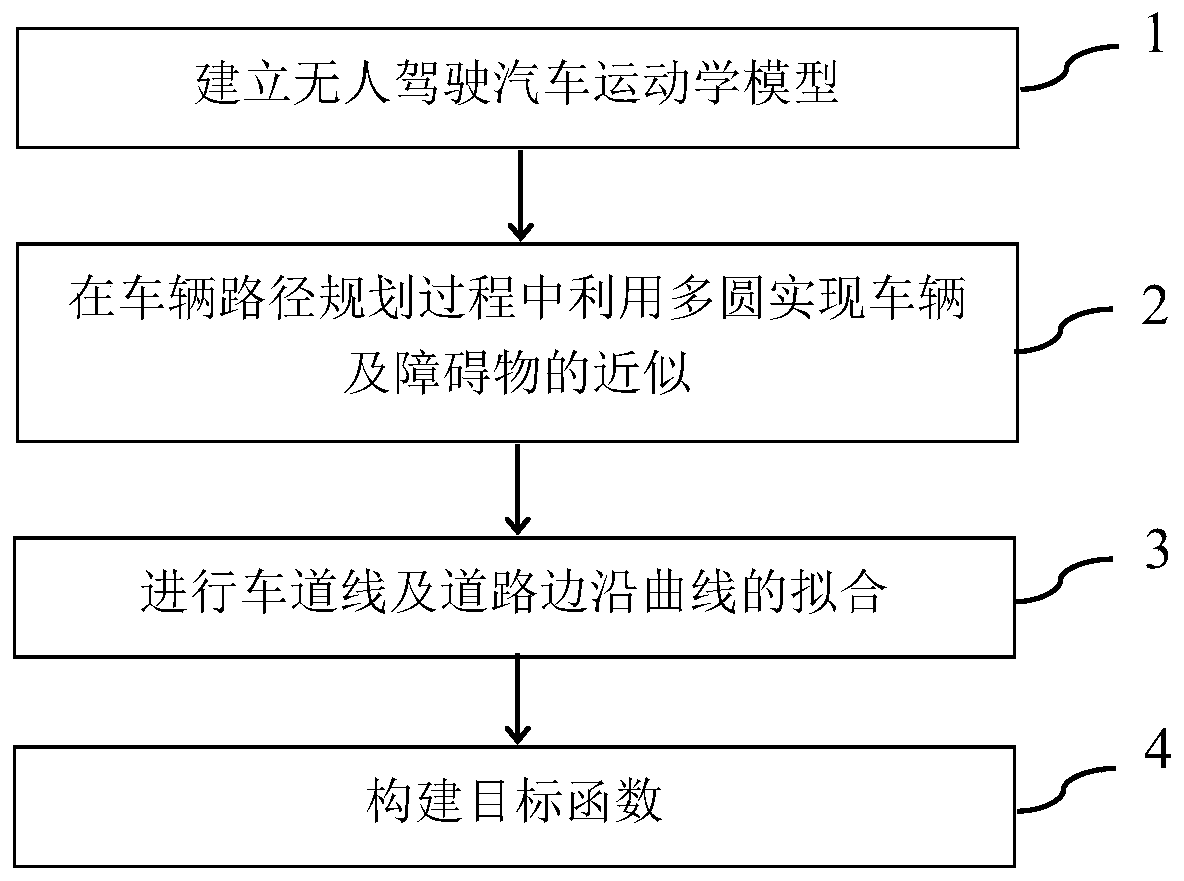
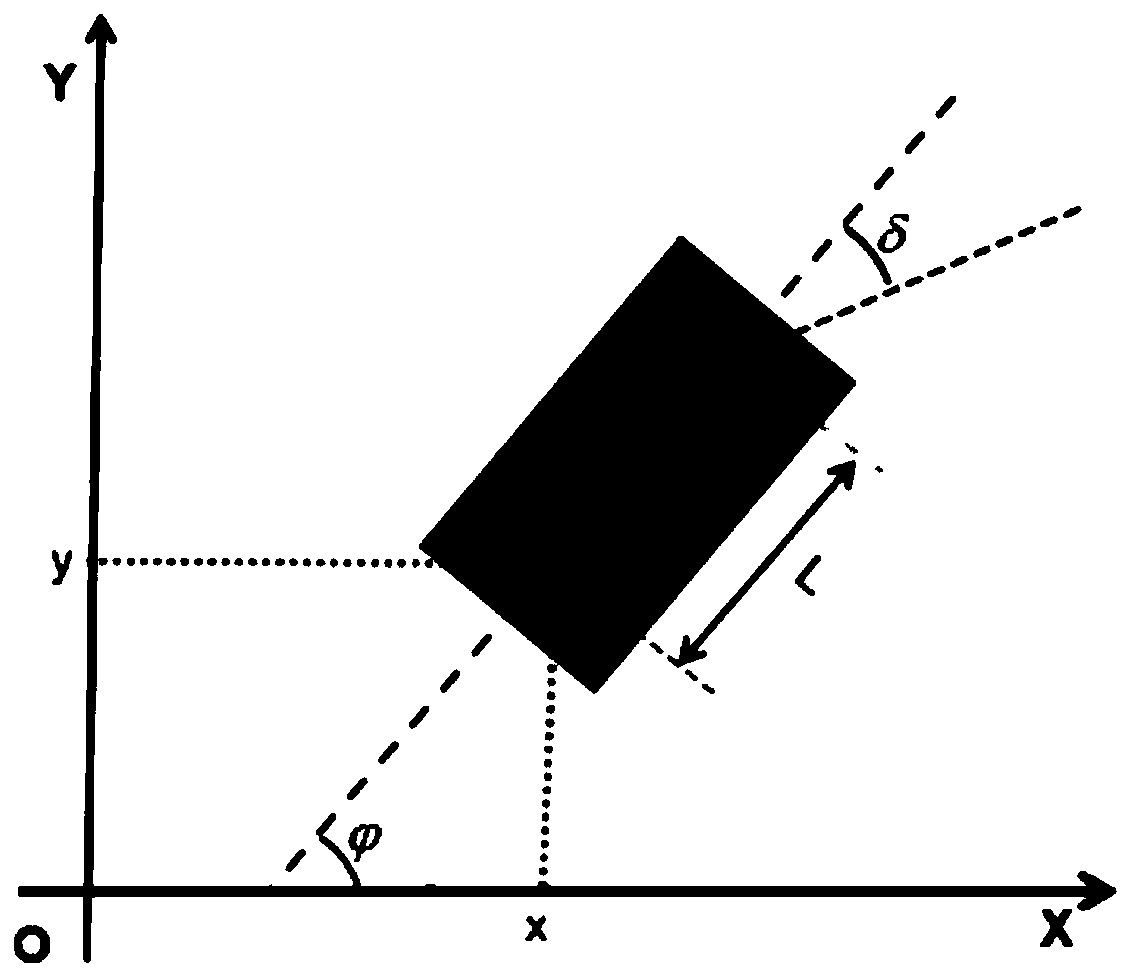
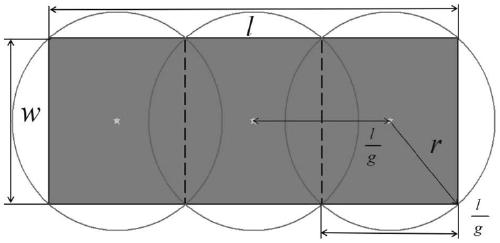
[0057] 1. The basic framework of model prediction local path planning
[0058] Model prediction deals with path planning, which is equivalent to an optimization problem. The biggest advantage of this method is that it can easily take into account the vehicle's own constraints and people's various expectations for the path. In order to reduce the complexity of calculation and improve the calculation spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com