Small multi-rotor unmanned aerial vehicle camera control method based on eyeball recognition tracking technology
A technology of a multi-rotor unmanned aerial vehicle and a control method, applied in the field of camera control of a small multi-rotor unmanned aerial vehicle, can solve the problems of low operation cost, small size and high transformation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in more detail below in conjunction with the example of the camera control of the small multi-rotor UAV based on the eyeball recognition tracking technology.
[0018] The small multi-rotor unmanned aerial vehicle camera control method based on the eyeball identification and tracking technology proposed by the present invention, the specific steps are as follows:
[0019] Step 1: Install a miniature camera on the receiving device of the small multi-rotor UAV camera to collect images, such as the console screen and augmented reality equipment. A micro-camera is used to collect images of one eye of the user.
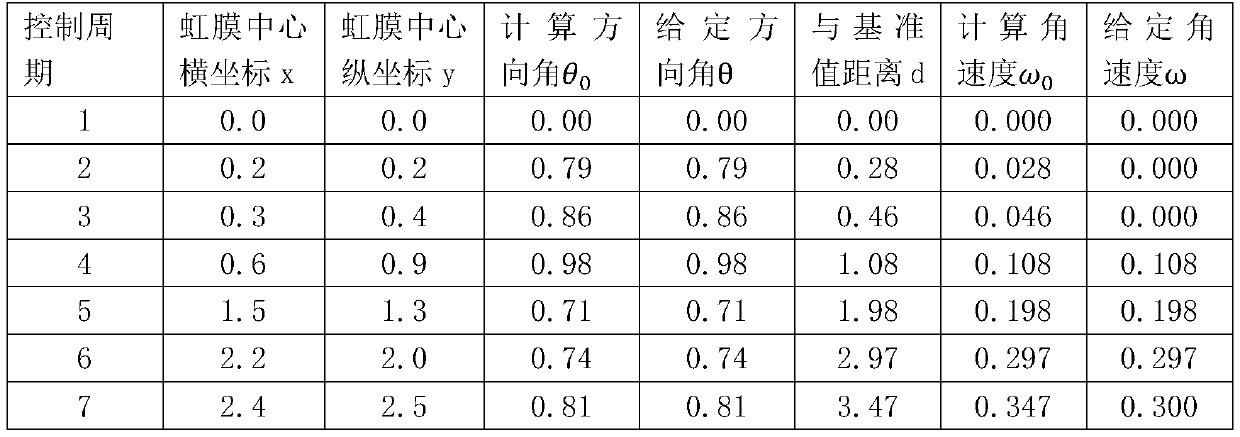
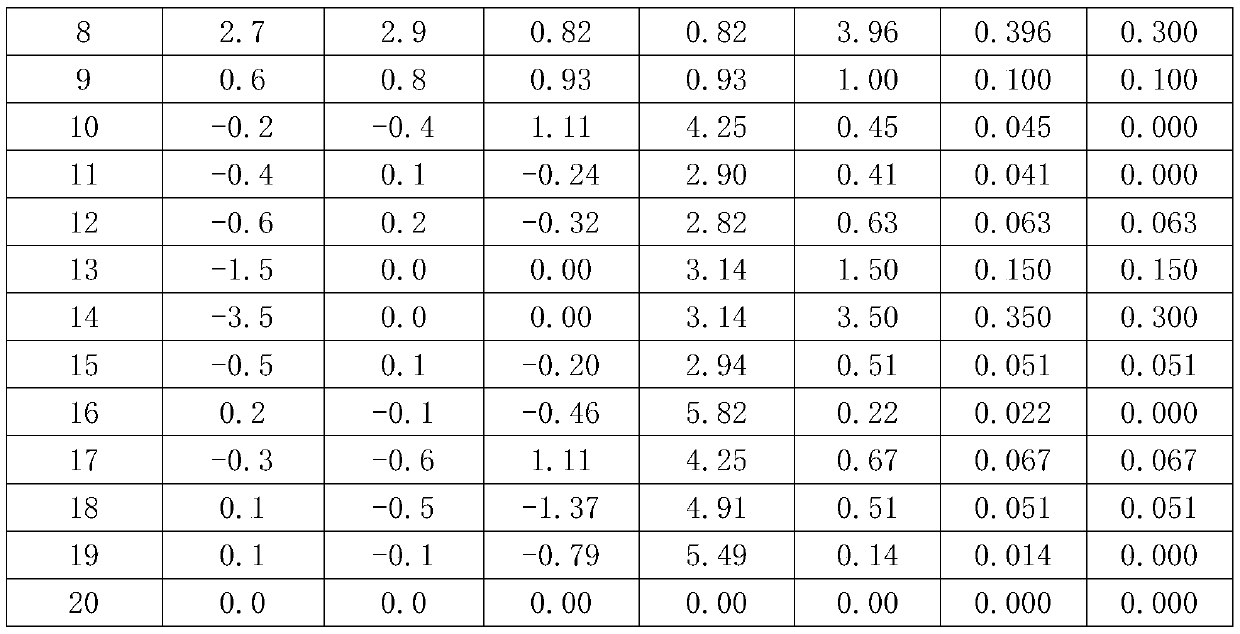
[0020] Step 2: The user stares at the center of the image collected by the UAV camera, locates the iris position through steps 3 to 5, and uses the iris positioning information to establish a two-dimensional rectangular coordinate system with the current iris center as the origin O(0,0) xOy, so as to complete the setting of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com