Cluster recycling control method, device, device and readable storage medium
A control method and cluster technology, applied in the field of robotics, can solve the problems of inefficiency of multiple AUVs, reduce recovery time and recovery cost, solve inefficiency, and improve practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
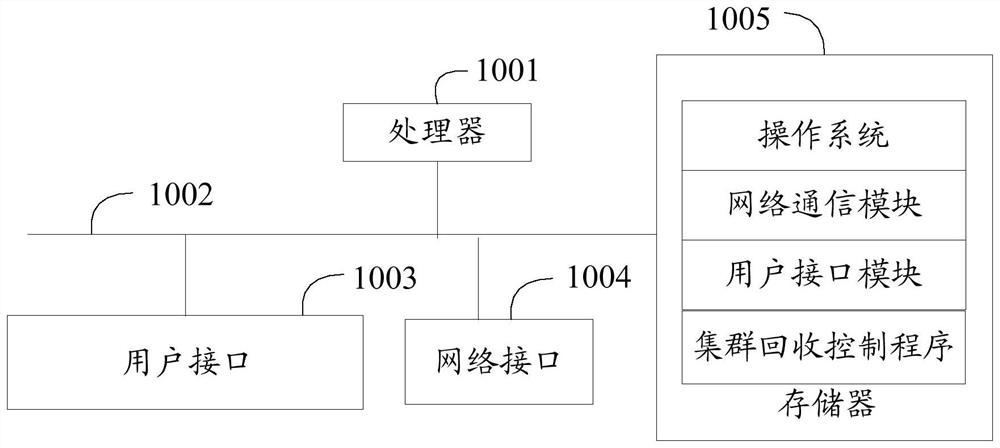
[0041] like figure 1 shown, figure 1 It is a schematic diagram of the terminal structure of the hardware operating environment involved in the solution of the embodiment of the present invention.
[0042] The terminal in the embodiment of the present invention may be a PC, or may be a mobile terminal device with a display function, such as a smart phone and a tablet computer.
[0043] like figure 1 As shown, the terminal may include: a processor 1001 , such as a CPU, a communication bus 1002 , a user interface 1003 , a network interface 1004 , and a memory 1005 . Among them, the communication bus 1002 is used to realize the connection and communication between these components. The user interface 1003 may include a display screen (Display), an input unit such as a keyboard (Keyboard), and the optional user i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com