Navigation path planning method based on area segmentation and computer readable storage medium
A navigation path and area segmentation technology, applied in navigation calculation tools and other directions, can solve problems such as long planning time, low ball collection efficiency, long path length, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
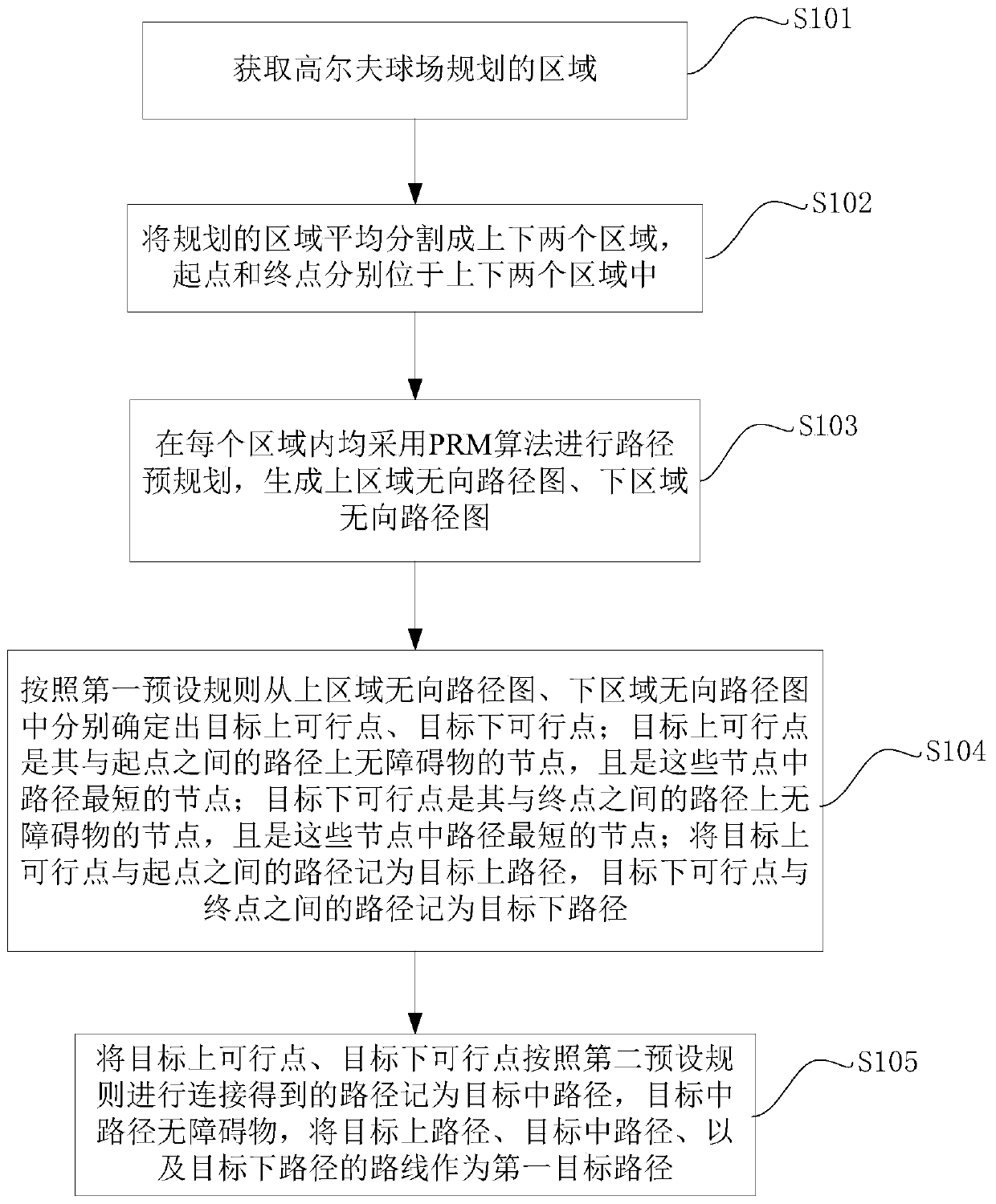
[0054] This embodiment will provide a navigation path planning method based on area segmentation, see figure 1 , the navigation path planning method based on region segmentation includes:
[0055] S101. Obtain the planned area of the golf course;
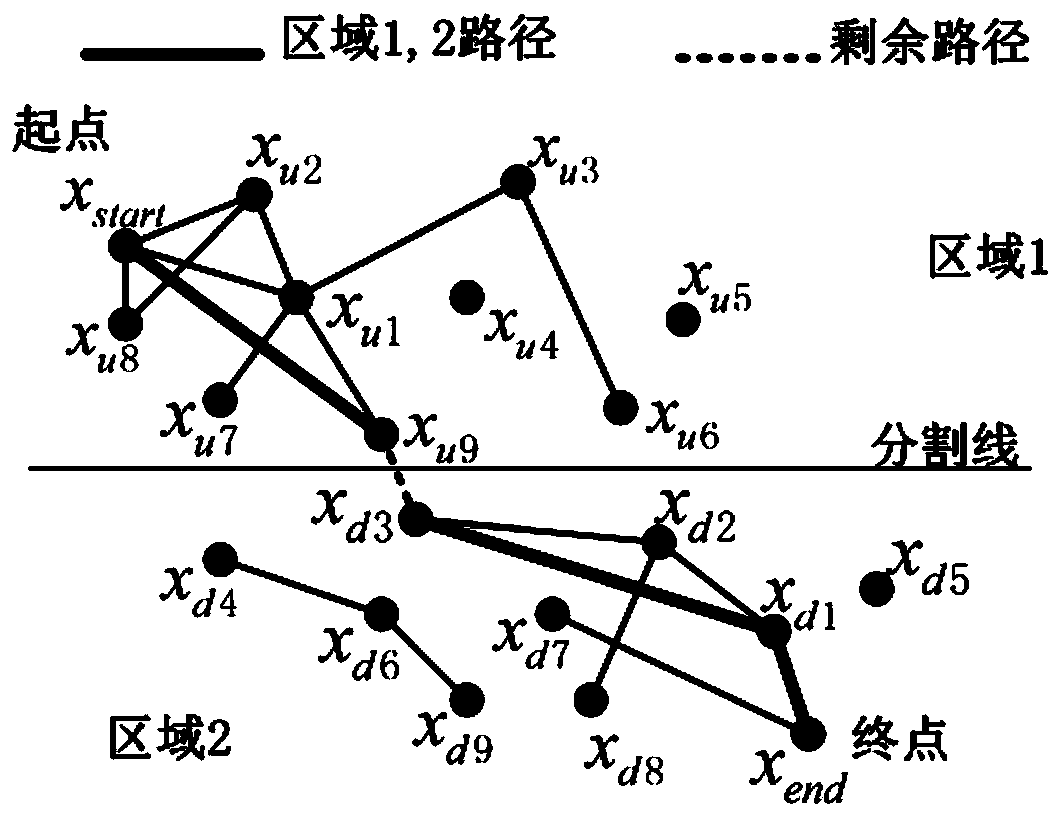
[0056] S102. Divide the planned area into upper and lower areas on average, and the starting point and the end point are respectively located in the upper and lower areas;
[0057] S103. Use the PRM algorithm to pre-plan the path in each area, and generate an undirected path map for the upper area and an undirected path map for the lower area;
[0058] Generate an undirected path graph composed of several random points and starting points through the PRM algorithm in the upper area, and generate an undirected path graph composed of several random points and end points through the PRM algorithm in the lower area;
[0059] Using the PRM algorithm, it is possible to use fewer nodes to complete the pre-planning of the paths in the u...
Embodiment 2
[0108] This embodiment provides a terminal, and the terminal includes a processor, a memory, and a communication bus;
[0109] The communication bus is used to realize the connection communication between the processor and the memory;
[0110] The processor is used to execute one or more programs stored in the memory, so as to realize the steps of the navigation route planning method based on area segmentation in any one of the first embodiment.
[0111] Optionally, this embodiment further provides a computer-readable storage medium, where one or more programs are stored in the computer-readable storage medium, and one or more programs can be executed by one or more processors, so as to implement the first embodiment. The steps of any one of the navigation path planning methods based on area segmentation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com