Mobile cooperative control system and control method of distribution robots
A technology of collaborative control and control method, applied in the direction of control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as collision or stop moving, robots colliding with each other, robots stop moving forward, etc., to achieve The effect of improving compatibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below, the present invention will be further described in combination with specific embodiments.
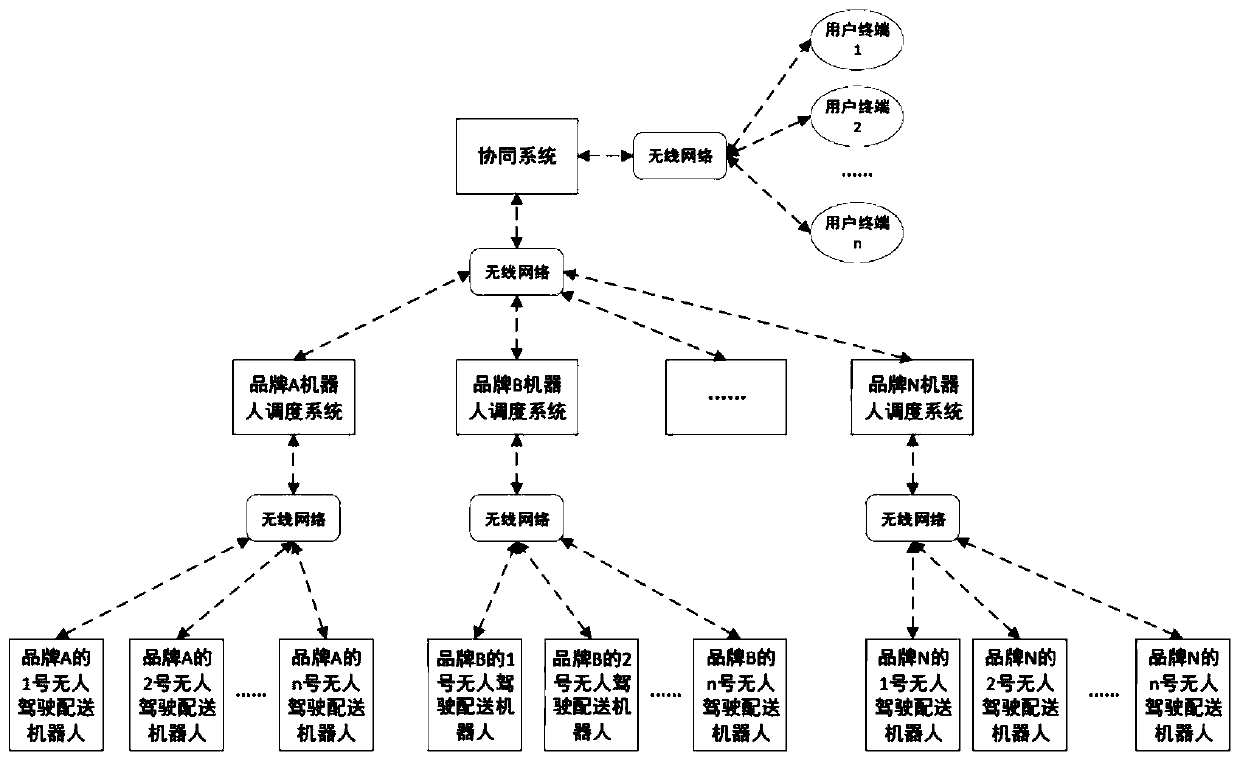
[0029] Such as figure 1 As shown, the collaborative control system in this embodiment includes a collaborative control terminal, a robot dispatching terminal, and a user terminal. The collaborative control terminal communicates with the user terminal and the robot dispatching terminal respectively through the (wireless) network. The user terminal is set on the user end and operated by the user. For example, it is set in each department of the hospital. . The collaborative control terminal can receive the robot call instruction sent by the user terminal, and obtain the real-time dynamic information of the delivery robot from the robot dispatch terminal, and send the robot dispatch instruction to the robot dispatch terminal according to the robot call instruction and combined with the real-time dynamic information of the robot. The robot dispatching terminal communicates w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com