AUV collision avoidance function verification method
A technology for functional verification and collision avoidance, which is applied to instruments, control/regulation systems, vehicle position/route/altitude control, etc. It can solve the problems of high risk and collision of AUV collision avoidance function verification, and achieve a clear, feasible and verified method. Process safety and the effect of improving test efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below with reference to the accompanying drawings and examples.
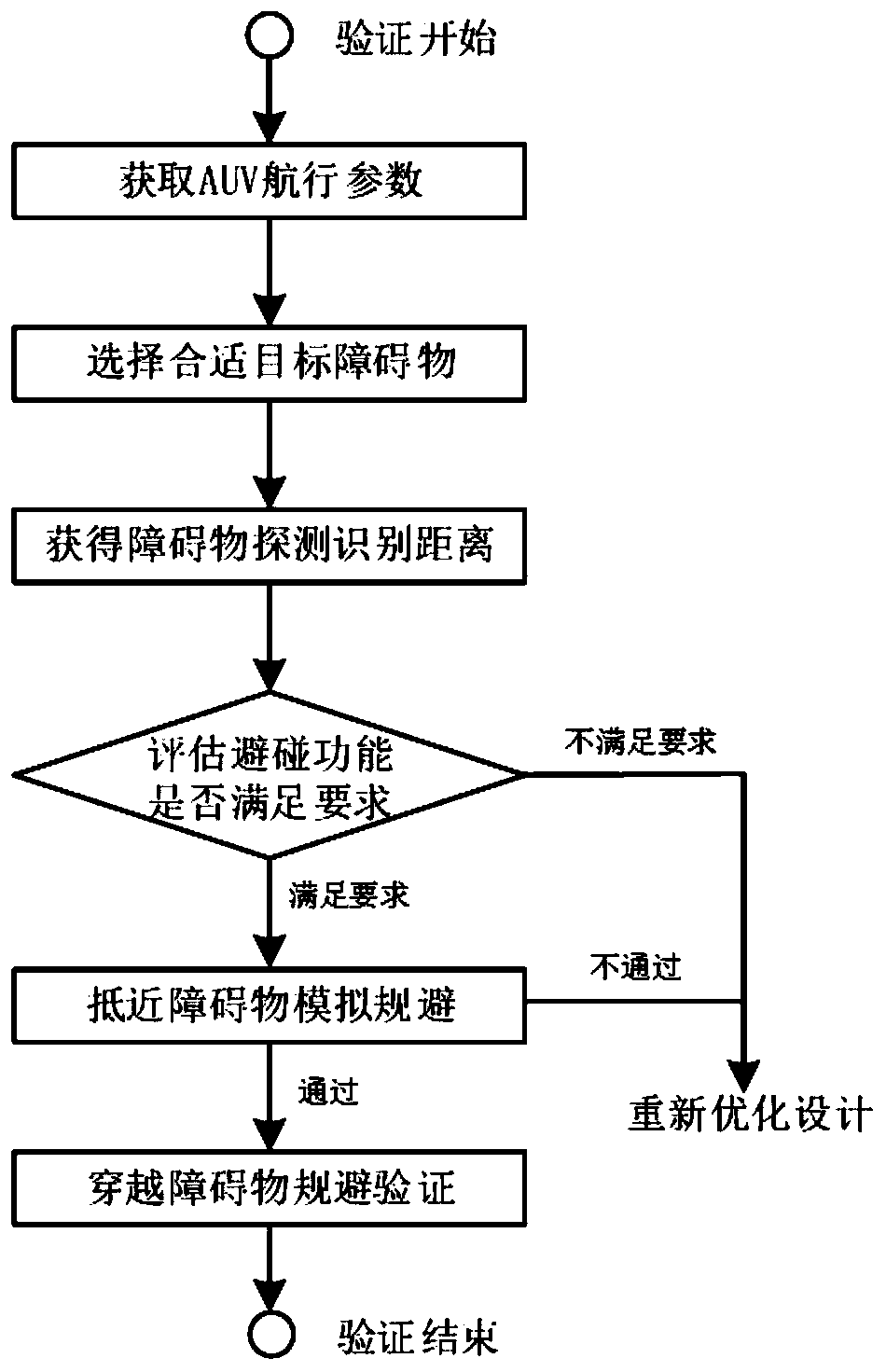
[0023] This embodiment provides a verification method for AUV collision avoidance function, such as figure 1 As shown, the verification method is as follows: Step 1, obtain AUV-related navigation parameters; Step 2, select a suitable target obstacle; Step 3, obtain the detection and recognition distance of AUV obstacles; Step 4, evaluate whether the collision avoidance function meets the requirements; Step 5, Approaching obstacles and simulating avoidance; step 6, passing through obstacles to verify the collision avoidance function.
[0024] Specific steps are as follows:
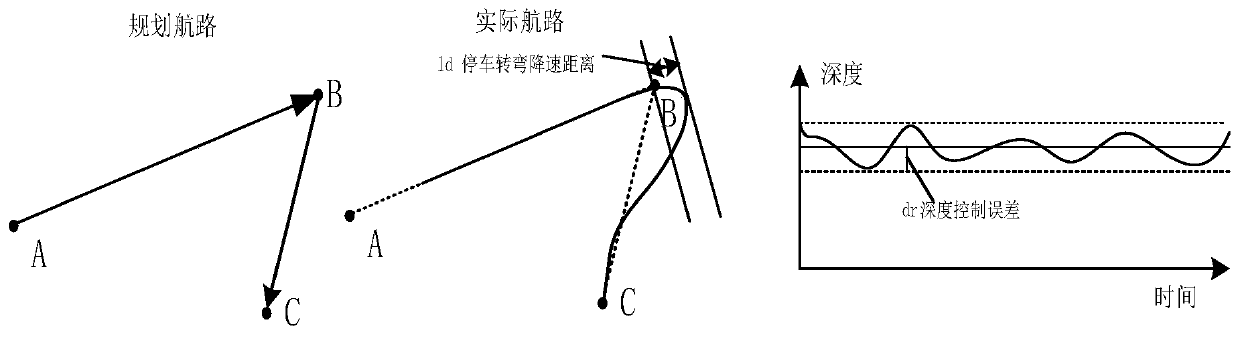
[0025] Step 1. Obtain the relevant main navigation parameters of the AUV through the actual navigation of the AUV, mainly including the stop and turn deceleration distance ld and the navigation depth control error dr. Among them, the stopping and turning deceleration distance ld is ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com