


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method of judging advancing direction through geomagnetic data
A technology of traveling direction and magnetometer data, which is applied in directions such as navigation, ground navigation, and measurement devices through speed/acceleration measurement, which can solve the problems of easy interference, large heading angle fluctuation, and angle deviation of the magnetometer of mobile devices. Achieve the effect of avoiding false accumulation and divergence of attitude angle, low cost, and avoiding deadlock of universal joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] A method for judging the direction of travel through geomagnetic data, characterized in that: the method comprises the following steps:
[0026] a. Perform data processing on the sensor, low-pass filter the data of the three-axis accelerometer and three-axis magnetometer, and filter out the high-frequency noise of the low-precision inertial sensor;
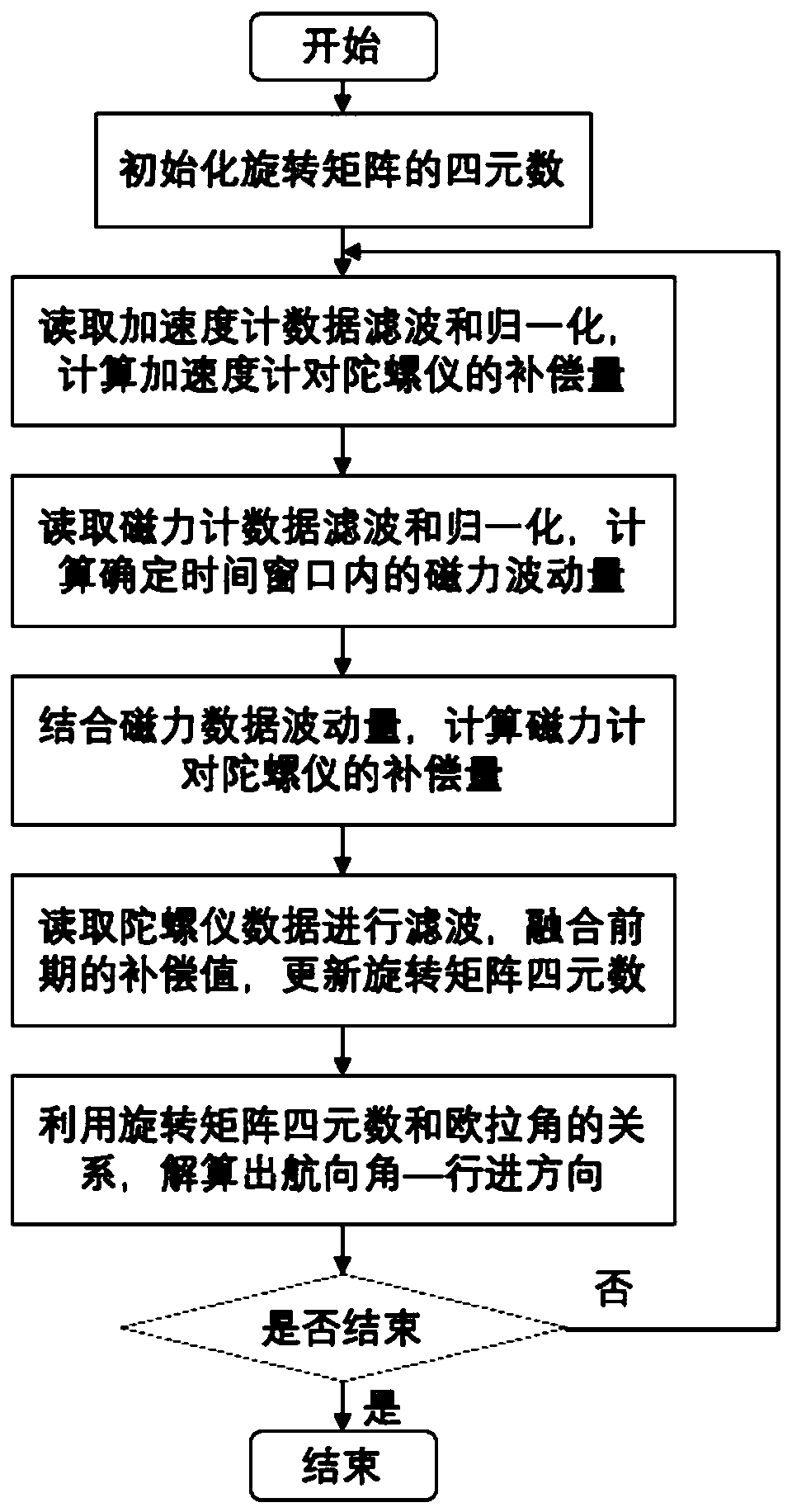
[0027] b. Initialize the quaternion of the rotation matrix;
[0028] c. Read the accelerometer data of the mobile device, perform low-pass filtering and normalization processing, and calculate the compensation component of the accelerometer to the gyroscope;
[0029] d. Read the magnetometer data of the mobile device, perform low-pass filtering and normalization processing, and calculate the fluctuation of the magnetometer data within a certain time window;
[0030] e. Calculate the compensation component of the magnetometer to the gyroscope in combination with the fluctuation of the magnetometer data;
[0031] f. Read th...
Embodiment 2
[0035] a. Sensor data processing: Low-pass filtering is performed on the data of the three-axis accelerometer and three-axis magnetometer to filter out the high-frequency noise of the low-precision inertial sensor.
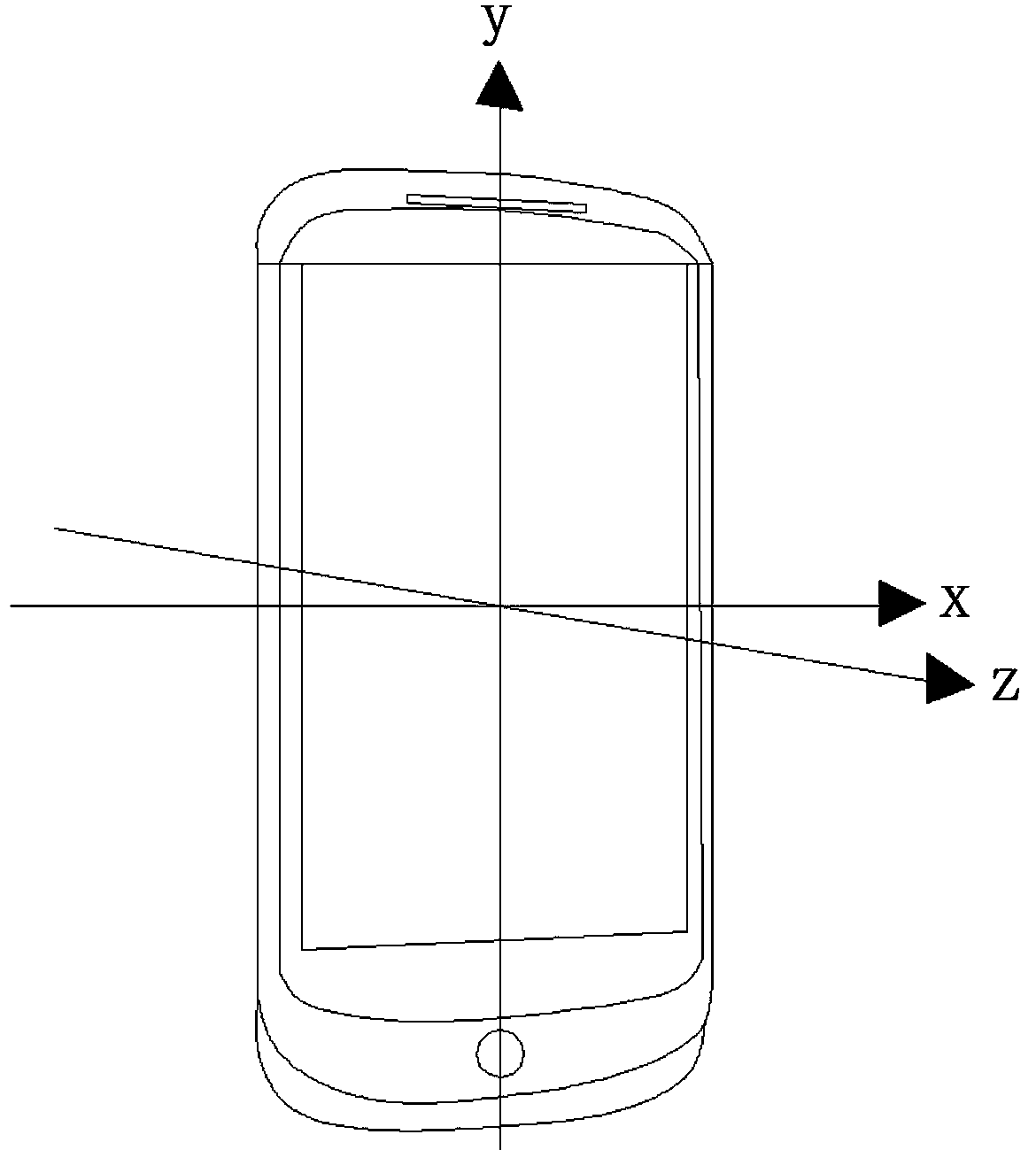
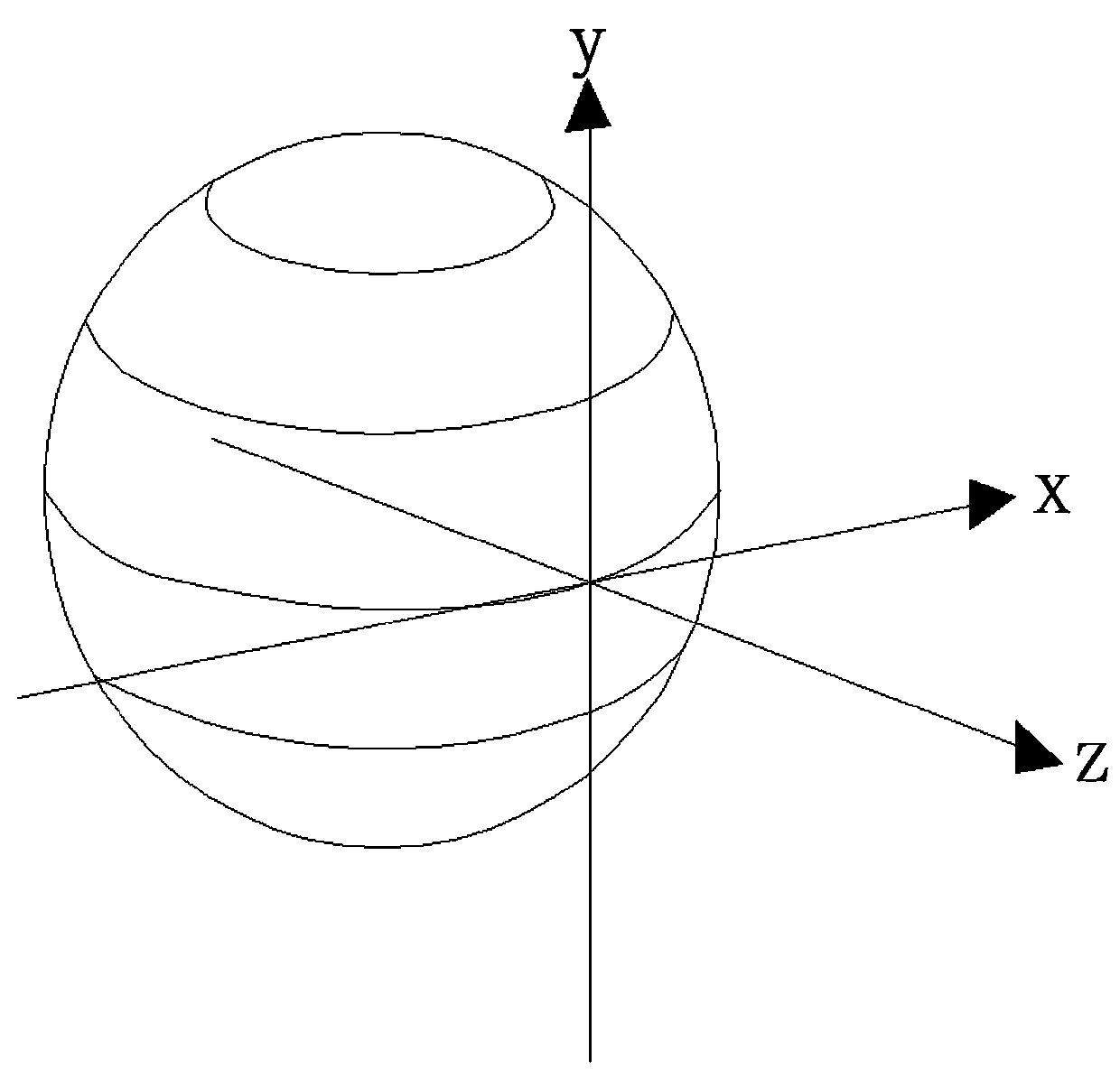
[0036] b. Initialize the quaternion and align it with the initial coordinate system
[0037] c. Collect three-axis accelerometer data and magnetometer data, fuse them into the attitude quaternion for complementary filtering
[0038] d. Collect the three-axis gyroscope data, combine the above fusion results, and solve the quaternion differential equation
[0039] e. Normalized attitude quaternion
[0040] f. Through the relationship between quaternion and attitude transformation matrix, convert quaternion into Euler angle: pitch angle, roll angle and heading angle
[0041] g. Extract the heading angle, which is the forward direction of pedestrians.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com