Pile pressing machine automatic position searching method and system
A pile driver, automatic technology, applied in the direction of satellite radio beacon positioning system, radio wave measurement system, sheet pile wall, etc., can solve the problems of long time consumption, complicated process, and inability to obtain the direction and position of pile driver in real time, and achieve The effect of improving drilling accuracy and reducing personnel input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
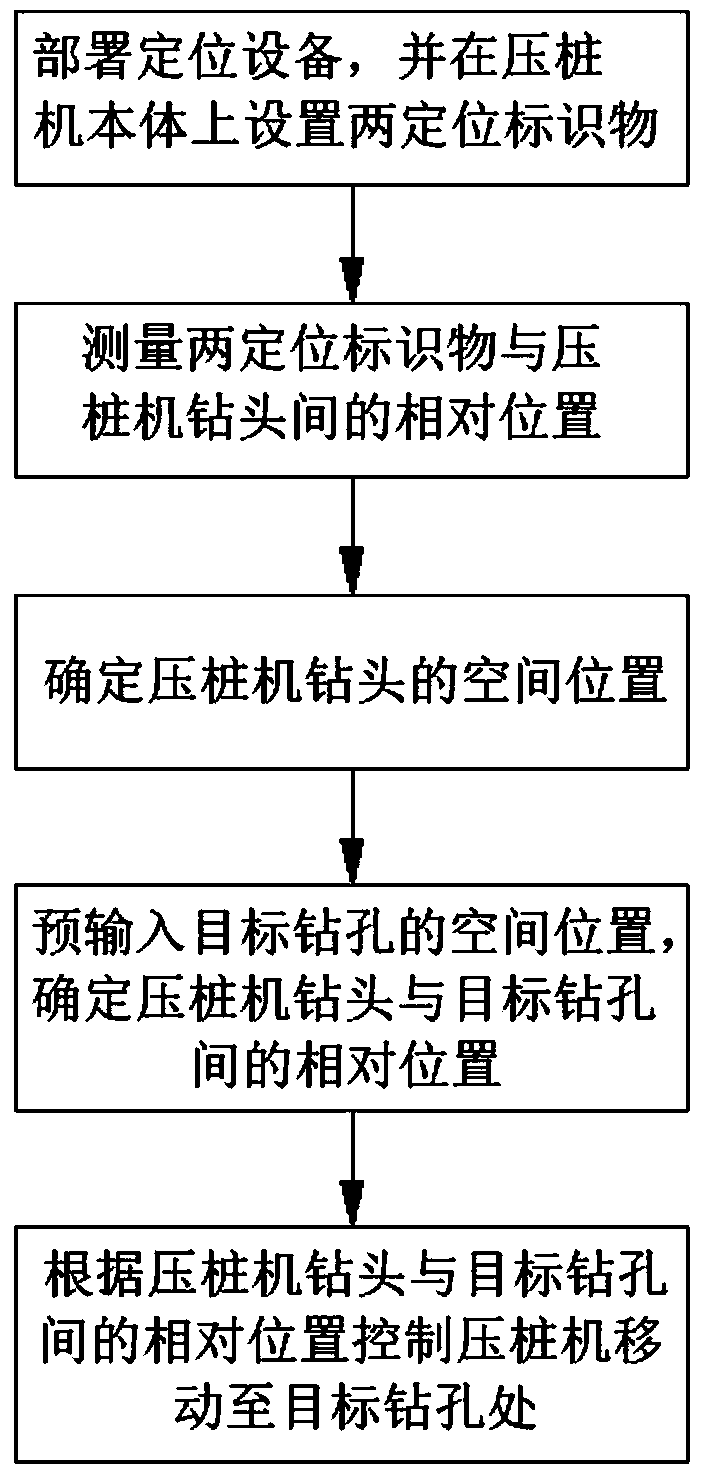
[0037] A method for automatically finding the position of a pile driver, comprising the following steps:
[0038] Deploy positioning equipment and set two positioning markers on the pile driver body;
[0039] Measure the relative position between the two positioning markers and the drill bit of the pile driver respectively;
[0040] Obtain the spatial positions of the two positioning markers by the positioning device, and determine the spatial position of the pile driver drill according to the spatial positions of the two positioning markers and the relative position between the two positioning markers and the pile driver drill bit;
[0041] Pre-input the spatial position of at least one pile hole that needs to be pressed, select a pile hole as the target pile hole, and determine the relationship between the pile driver drill bit and the target pile hole through the spatial position of the target pile hole and the spatial position of the pile driver drill bit. The relative po...
Embodiment 2
[0045] In this embodiment, on the basis of Embodiment 1, further, the positioning device is a satellite positioning system or a high-precision positioning system based on satellite positioning, such as GPS satellite positioning system, Beidou satellite positioning system, and the like. The positioning marker is a GNSS antenna.
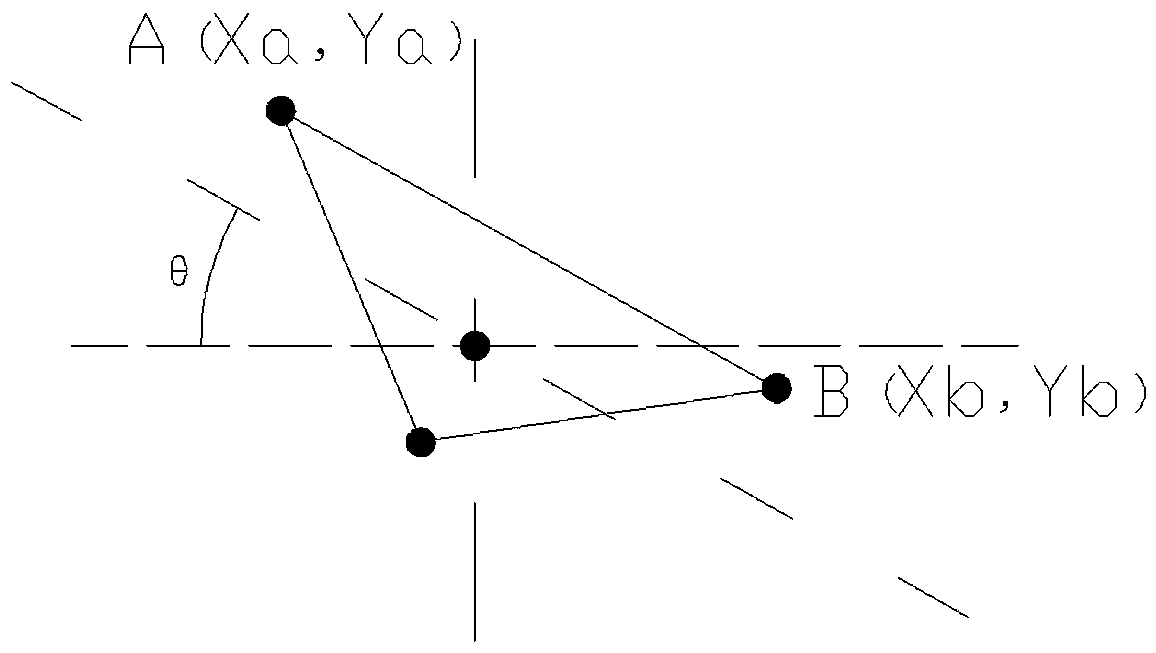
[0046] Further, see Figure 2 to Figure 4 , also includes a correcting step for correcting the spatial positions of the two positioning markers, specifically as follows:
[0047] The pile driver body is also provided with a six-axis gyroscope, and the six-axis gyroscope obtains the inclination angle between the pile driver body and the horizontal plane, such as figure 2 As shown, the tilt angle obtained by the six-axis gyroscope is θ;
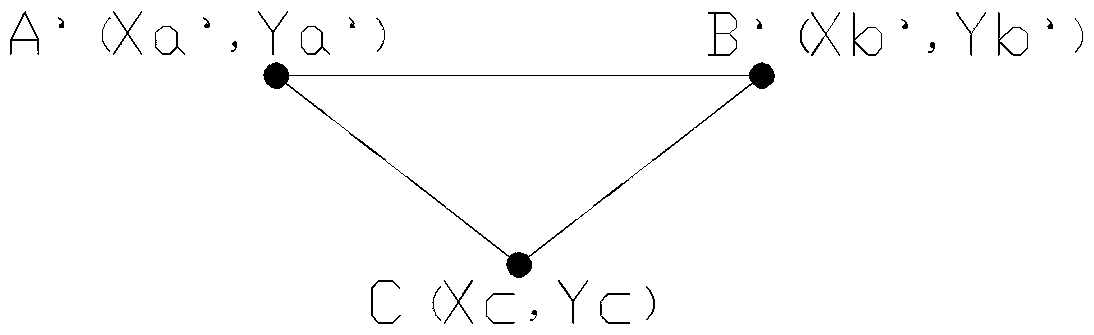
[0048] see Figure 4 , to establish a plane Cartesian coordinate system horizontal to the ground; D, E, and F are the coordinates of the pre-input target borehole.
[0049] Acquiring the positioning coordinates A (...
Embodiment 3
[0054] A system for automatic positioning of a pile driver, comprising:
[0055] A positioning module, the positioning module includes a positioning device and two positioning markers arranged on the pile driver body;
[0056] The measurement module is used to measure the relative position between the two positioning markers and the drill bit of the pile driver;
[0057]A calculation module, configured to calculate the spatial position of the pile driver bit according to the spatial position of the two positioning markers and the relative position between the two positioning markers and the pile driver bit;
[0058] The input module is used to input the spatial position of at least one pile hole that needs to be pressed;
[0059] The control module is used to issue control commands to the electronic control system of the pile driver to control the movement of the pile driver.
[0060] This embodiment determines the spatial position of the center point of the drill bit by set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com