Vibration suppression method of flexible mechanical arm based on trajectory segmentation optimization
A flexible robotic arm and vibration suppression technology, which is applied in design optimization/simulation, CAD numerical modeling, geometric CAD, etc., can solve the problems of delay characteristics and poor precision, and achieve good vibration suppression effect, good precision, and track The accuracy of the middle section maintains a good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to better understand the technical features, technical contents and technical effects of the present invention, the method of the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings.
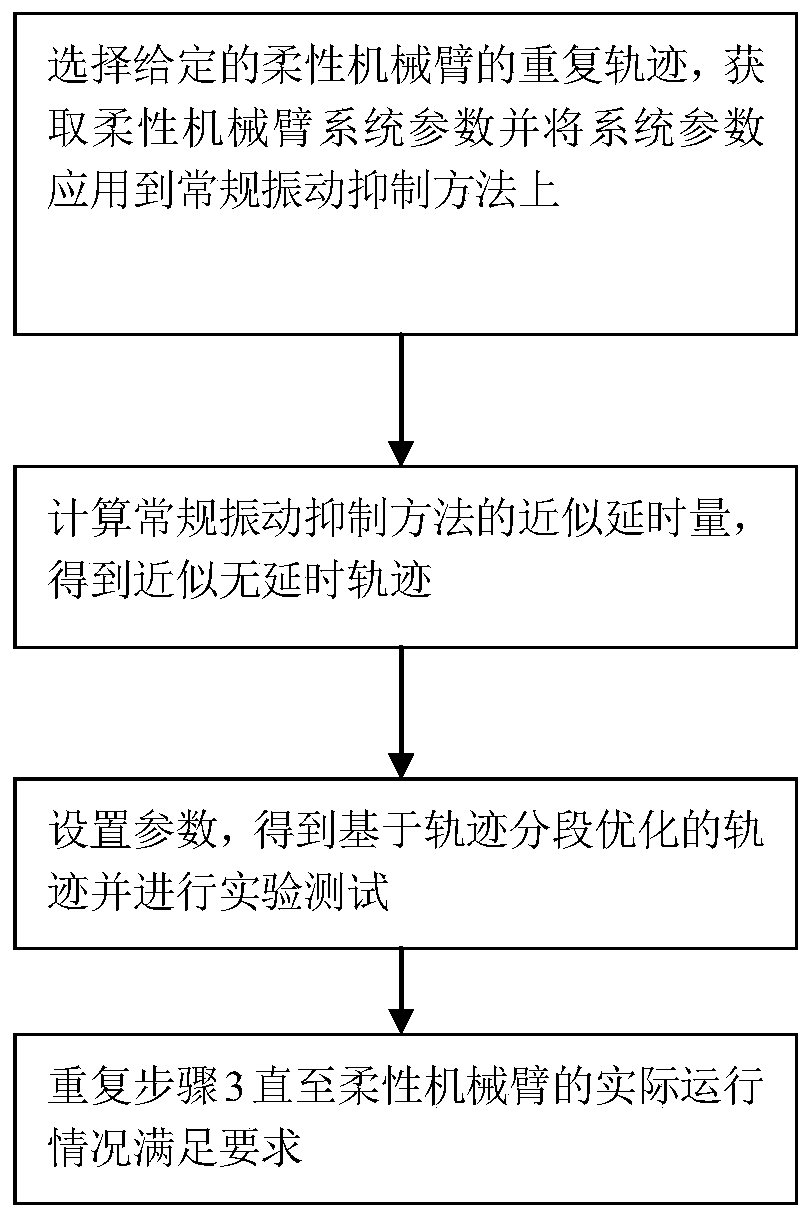
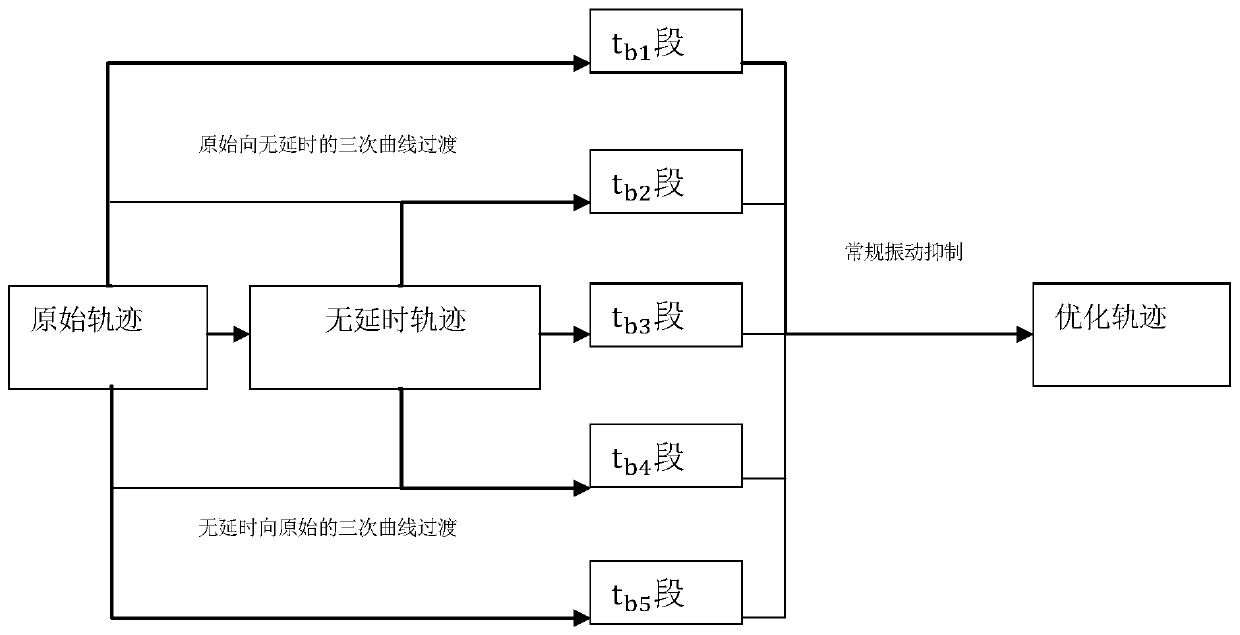
[0036] Such as figure 1 with figure 2 As shown, the vibration suppression method of the flexible manipulator based on trajectory segmentation optimization proposed by the present invention comprises the following steps:
[0037] Step 1. Obtain the undamped natural frequency ω of the single-joint flexible manipulator system n and the damping ratio ξ, the transfer function of the second-order system is obtained as:
[0038]
[0039] According to the principle of the conventional vibration suppression method, the frequency domain expression of the method can be obtained as:
[0040]
[0041] in t 2 =T,t 3 =2T, through the expression, we can know that the final time delay brought by this conventional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com