Camera position real-time repositioning method of handheld three-dimensional scanning system
A technology of three-dimensional scanning and camera position, which is applied in computer parts, character and pattern recognition, image data processing, etc. It can solve the problems of excessive calculation, loss of adjacency relationship, and large impact of light to achieve real-time performance and accuracy Improve, eliminate image distortion, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
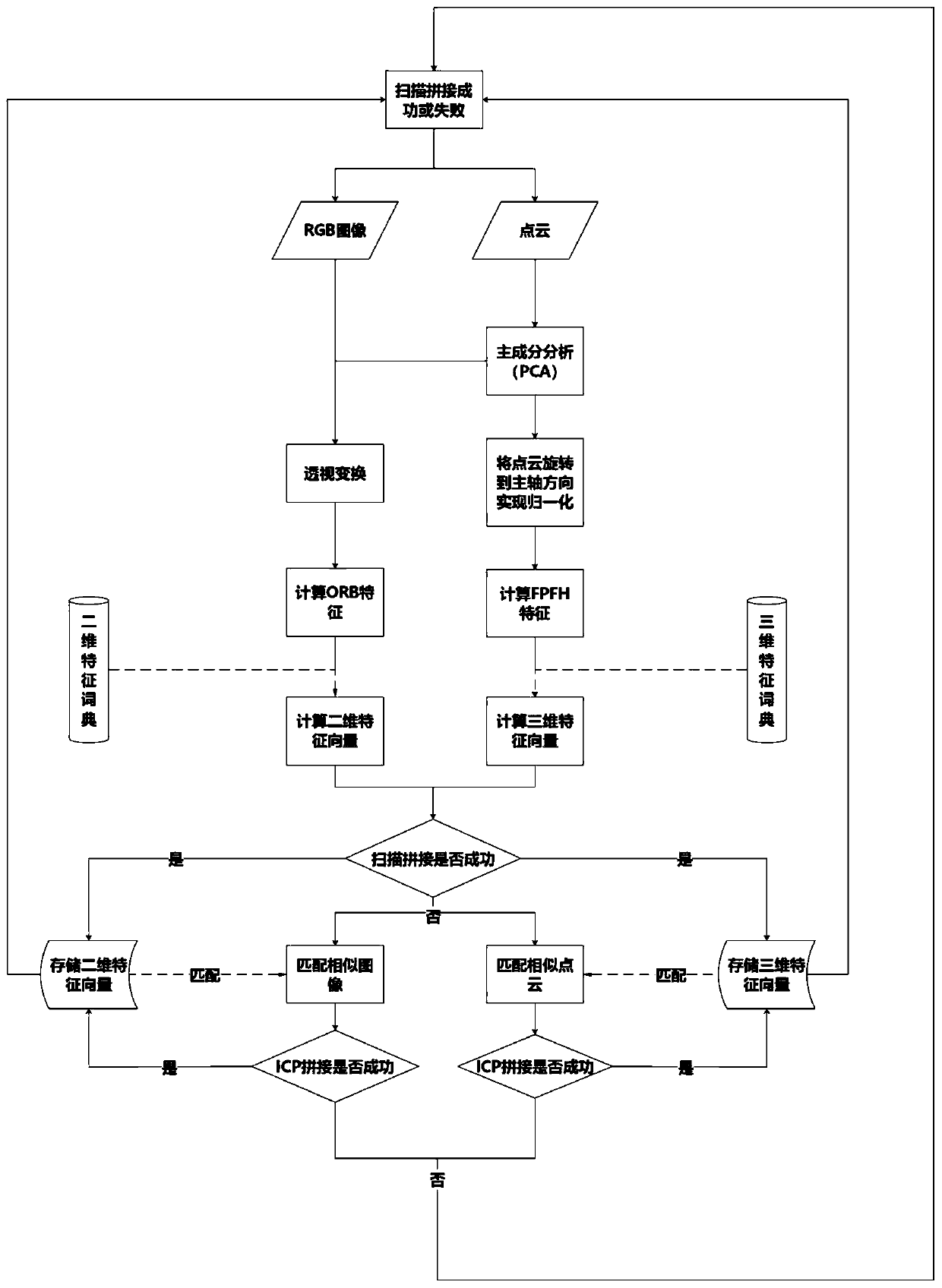
[0081]A handheld 3D scanning system equipped with this algorithm is installed on the Intel Core i5 general-purpose computing platform for continuous scanning. Due to user operation errors, the scanning is interrupted, such as figure 2 As shown, the repositioning function is triggered at this time, and the user points the scanning device at any part scanned before, such as image 3 As shown, after the algorithm is executed, the camera position is relocated in about 50ms (from figure 2 Middle A is relocated to image 3 center B) to allow the scan to continue. Figure 4 In order to verify the two-dimensional image matching results after successful relocation, Figure 5 In order to verify the point cloud matching results, it can be found that the two-dimensional image and point cloud matching results are in line with the actual situation.
[0082] Using the traditional bag-of-words model algorithm for relocation, there will be misjudgment, for example, it is actually the same...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com