Curve ACC target vehicle identification method based on multi-sensor fusion
A multi-sensor fusion and target vehicle technology, applied in the field of ACC target vehicle recognition on curves based on multi-sensor fusion, can solve problems such as accuracy reduction, traffic accidents, and target loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with accompanying drawing.
[0024] Curve ACC target vehicle identification method of the present invention, comprises the following steps:
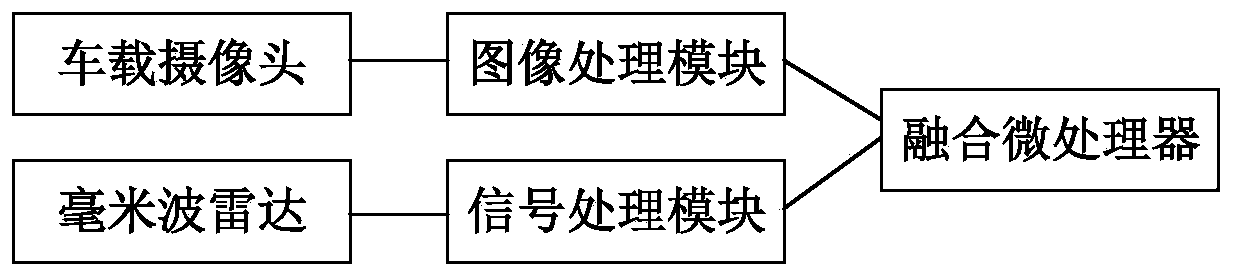
[0025] Step 1: Installation of car camera and millimeter wave radar
[0026] The vehicle-mounted camera (Minieye is selected in the embodiment of the present invention) is installed at 1-3 centimeters directly below the interior rearview mirror, and the optical axis of the vehicle-mounted camera needs to coincide with the central axis of the vehicle, and the pitch angle of the vehicle-mounted camera is adjusted. In the straight road scene, the lower 2 / 3 area of the image is the road; the millimeter-wave radar (ESR millimeter-wave radar with a frequency of 77GHz produced by Delphi can be selected) is installed at the center of the front of the vehicle, and the height from the ground is between 35cm-65cm. The plane should be as perpendicular to the ground as pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com