Method and system for meal delivery system to control execution device to operate and computer equipment
An execution device and meal delivery technology, which is applied to non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., can solve the problem that the meal delivery system cannot control the running speed of the execution device in real time, etc., so as to improve performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
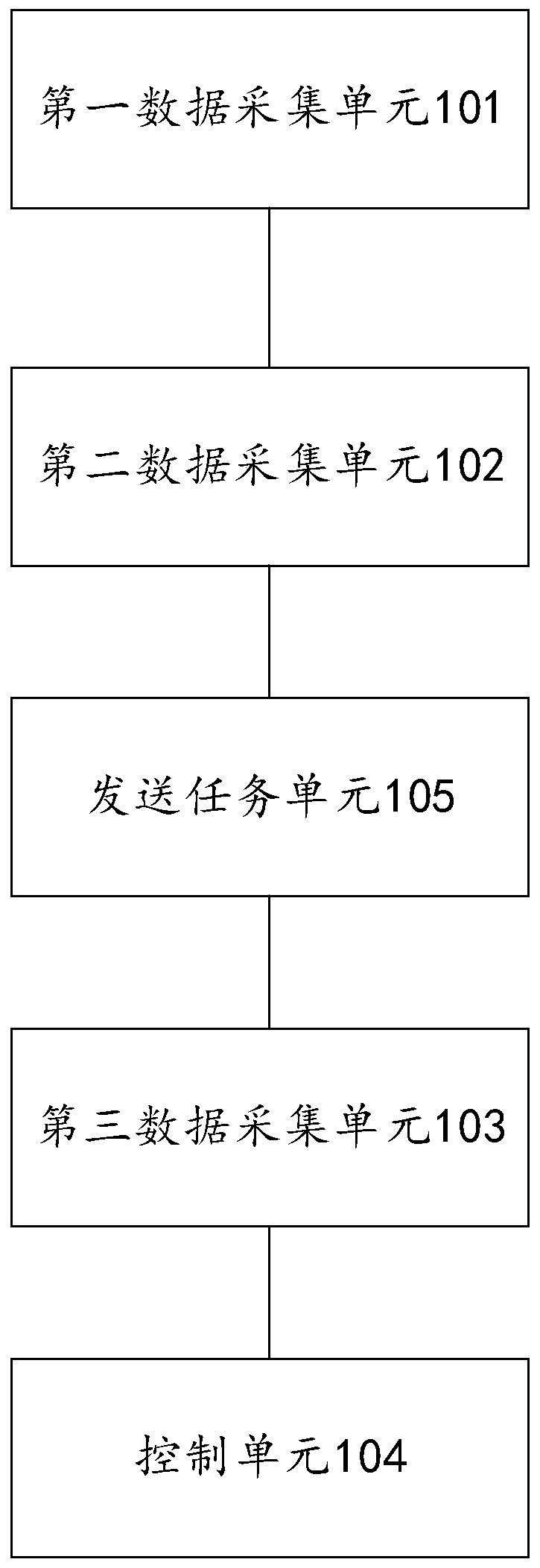
[0073] like figure 2 said, figure 2 It is a frame diagram of a system for controlling the execution device operation of the meal delivery system described in the embodiment of the present invention.
[0074] An embodiment of the present invention provides a system for controlling the operation of the execution device of the meal delivery system, including:
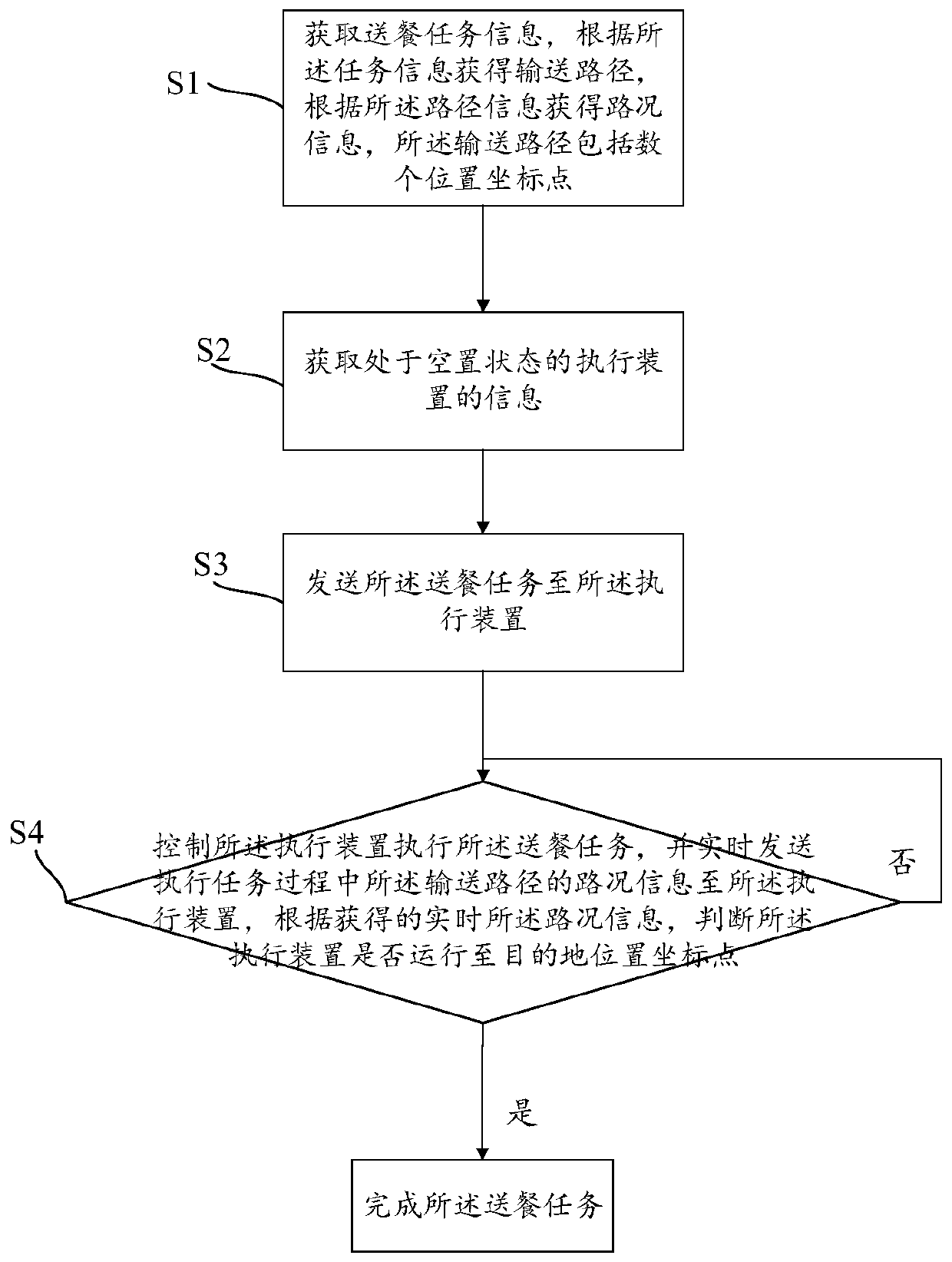
[0075] The first data acquisition unit 101 is configured to acquire meal delivery task information, and obtain a delivery route according to the task information;
[0076] The second data acquisition unit 102 is configured to acquire the information of the execution device in the vacant state;
[0077] Sending task unit 105, configured to send a meal delivery task to the executing device;
[0078] The third data acquisition unit 103 is configured to acquire in real time the road condition information of the delivery path during the implementation of the delivery task by the execution device;
[0079] A control unit 1...
Embodiment 3
[0108] Embodiments of the present invention provide a computer device, including:
[0109] memory for storing computer programs;
[0110] The processor is configured to implement the steps of the method for controlling the operation of the execution device of the meal delivery system as described in Embodiment 1 when executing the computer program. For realizing the first function, the second function, the third function and the fourth function according to the information in the memory, wherein:
[0111] The first function: determine the conveying path for the executing device to execute the meal delivery task, and calculate the travel distance of the executing device on the conveying path and Execution speed;
[0112] The second function: determine the accuracy of the stop position of the execution device, accurately locate the coordinate point of the stop position according to the obtained road condition information on the transportation path, and achieve the fixed-point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com