Crawler-type moving device based on vacuum chuck and glass curtain wall cleaning robot
A technology of vacuum suction cups and mobile devices, applied in robot cleaning machines, cleaning machinery, window cleaning, etc., can solve the problems of low efficiency and high risk factor, and achieve the effect of reducing weight, simplifying structure, and high cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] As a basic embodiment of the present invention, the purpose of this example is to provide a new type of crawler-type mobile device based on single valve vacuum suction cups, so as to solve the difficulty of continuous and stable suction of traditional crawler-type mobile devices with suction cups. The crawler belt with suction cup is moved back and forth while adsorbing on the cleaning surface of the belt.
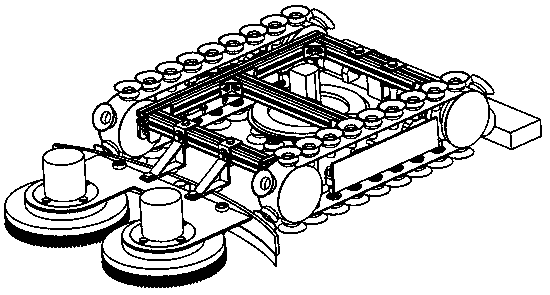
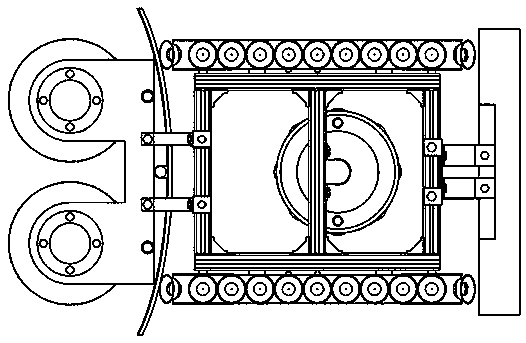
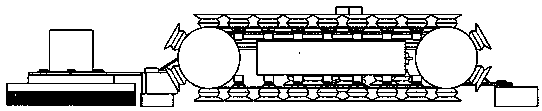
[0040] Reference Figure 1-4 In the existing crawler-type moving devices based on suction cups, one or more rows of suction cups are generally arranged in an array on the surface of the crawler. When the crawler belt is driven by the crawler belt, the suction cups on the crawler surface are sequentially adsorbed on the surface to be cleaned, so that the suction force of the suction cup is used to ensure that the crawler-type mobile device travels stably on a vertical smooth surface such as a glass curtain wall.
[0041] Reference Figure 7 , Figure 7 It is a side view o...
no. 2 example
[0049] On the basis of the first embodiment, those skilled in the art can easily think of combining the suction device with the existing crawler glass curtain wall cleaning robot based on vacuum suction cups, and then propose a glass curtain wall cleaning robot.
[0050] Reference Figure 1-4 In general, the glass curtain wall cleaning robot should at least include a main structure, a steering device, a moving device, and a cleaning device.
[0051] Reference Picture 12 , Figure 13 . In this example, the main structure includes the drive shaft 301, the rear support 302, the profile I 303, the front axle 304, the front support 305, the profile II 306, the angle connector 307, and the hexagon socket bolt III 308. The profile I303 and the profile II306 are fixedly connected by a corner connector 307 to form a stable structure. The main frame structure is fixedly installed with a motor 314 and a drive shaft 301 through a rear support 302. The drive shaft of the motor 314 is connecte...
no. 3 example
[0054] In view of the unreasonable design of the cleaning device of the glass curtain wall cleaning robot in the existing design, the purpose of this example is to provide a more reasonable cleaning part, which makes the cleaning robot more efficient, reduces the weight of the robot itself, and saves resources.
[0055] The cleaning part includes a cleaning brush head, a water spray head 114, a water suction hole 112, and a squeegee 104 installed at the front of the robot. The cleaning brush head in this example can be the brush plate 101 in the second embodiment, or other brush head devices, which is not limited in this example.
[0056] The cleaning brush head, the water spray head 114, and the water suction hole 112 are installed at the front of the squeegee 104. When the robot is working normally on the surface to be cleaned, the water spray head 114 sprays water to wet the surface to be cleaned, and the cleaning brush head separates the contaminants from the surface to be clea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com