Mobile robot virtual safety protection area protection system and method
A mobile robot, safety protection technology, applied in the direction of safety devices, control/regulation systems, instruments, etc., can solve the problems of high price, unsuitable for small robots, large size, etc., to meet safety requirements, achieve safe use, and guarantee The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
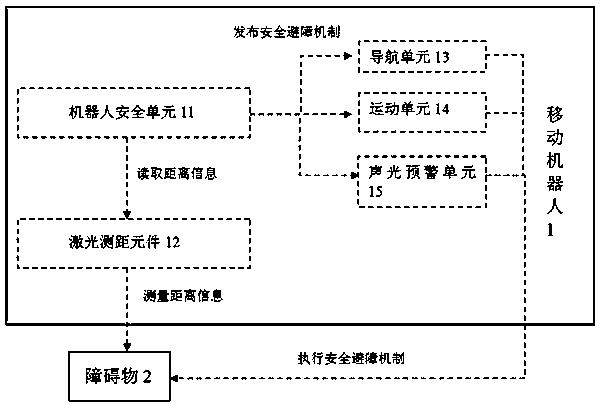
[0066] Such as figure 1 As shown, a mobile robot virtual safety protection area protection system provided by the present invention includes a robot safety unit 11 and a laser ranging element 12,
[0067] The robot safety unit 11 sets the scope of the virtual safety protection area, and the virtual safety protection area includes multi-level safety areas with different ranges, and the robot safety unit 11 sets the range of the mobile robot 1 in the multi-level safety area. Safety obstacle avoidance mechanism;
[0068] The laser ranging element 12 is installed on the mobile robot 1, and it measures the distance information of obstacles in real time. The robot safety unit 11 reads the distance data measured by the laser ranging element 12, and converts the coordinates to The distance data is converted into a data value in the same coordinate system as the virtual safety protection area, the area where the obstacle is located is judged by an algorithm, and the corresponding safe...
Embodiment 2
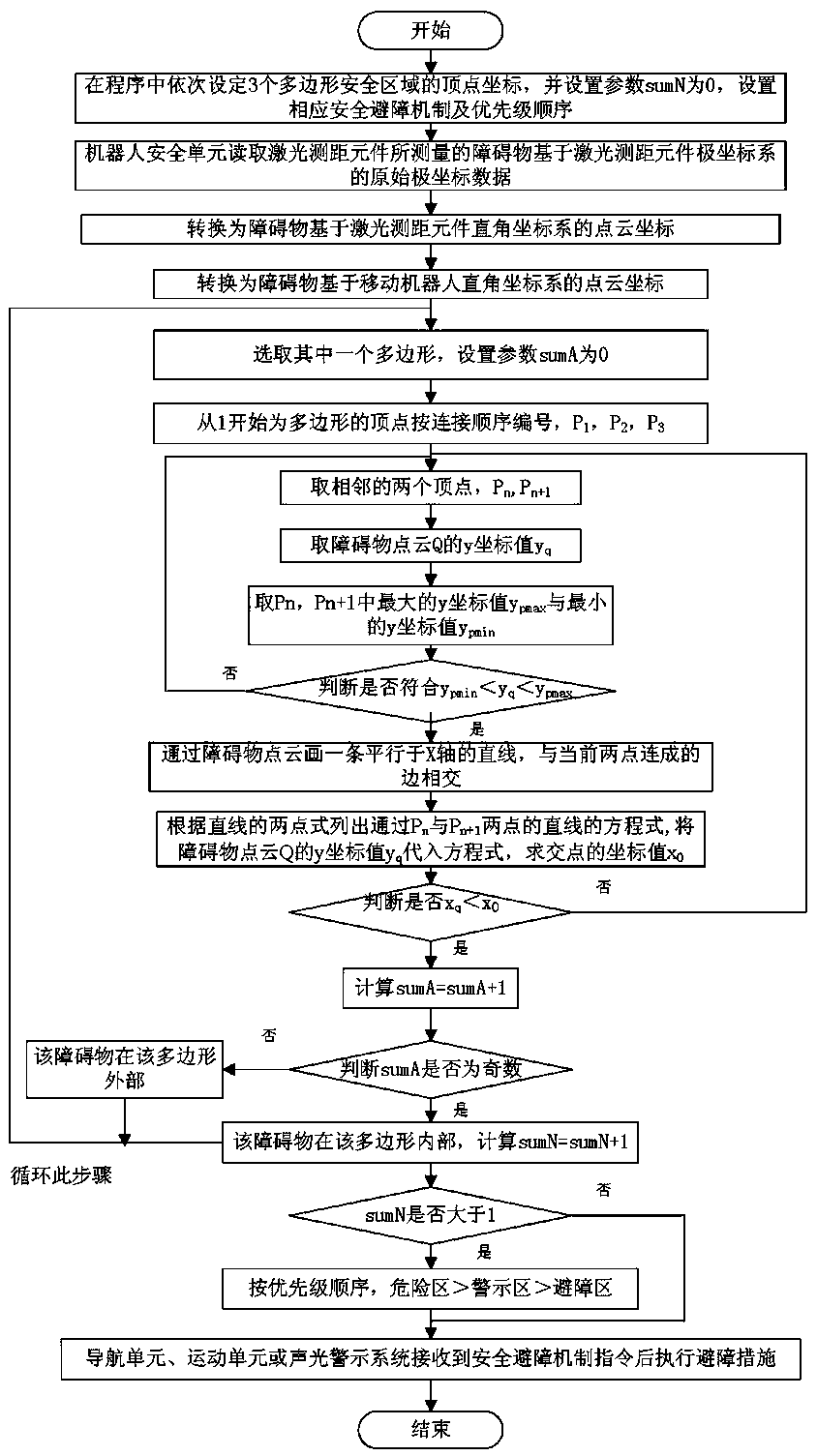
[0073] Such as figure 2 As shown, corresponding to the above-mentioned system, the present invention also provides a method for protecting a virtual safety protection area of a mobile robot, comprising the following steps:
[0074] Step S1: The robot safety unit sets the scope of the virtual safety protection area and the safety obstacle avoidance mechanism, which specifically includes the following steps:
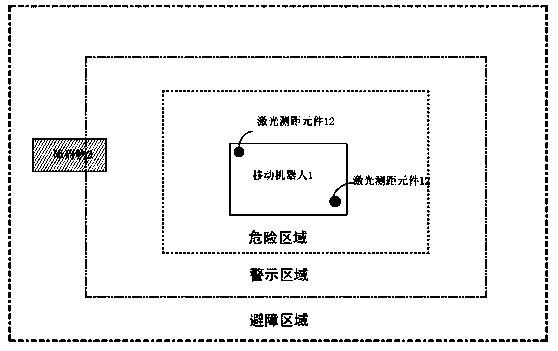
[0075] (1) The virtual safety protection area includes three levels of safety areas with different ranges. The setting method of each level of safety area is as follows: take the center coordinates of the robot as the origin, set 4 coordinate points around the robot, and set the four coordinates The polygonal area enclosed by connecting the points in turn is the security area of this level;
[0076] Among them, the coordinate value and the number of coordinate points can be set according to the robot's running speed and running environment;
[0077] (2) The safety o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com