Data processing method and device and robot
A data processing and robotics technology, applied in the field of robotics, can solve the problems of large amount of calculation, large induction error, and difficulty in long-distance detection, and achieve the effect of precise expression, accurate information and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0196] Example 1: Combining Figure 7 The flow chart of the method is shown.
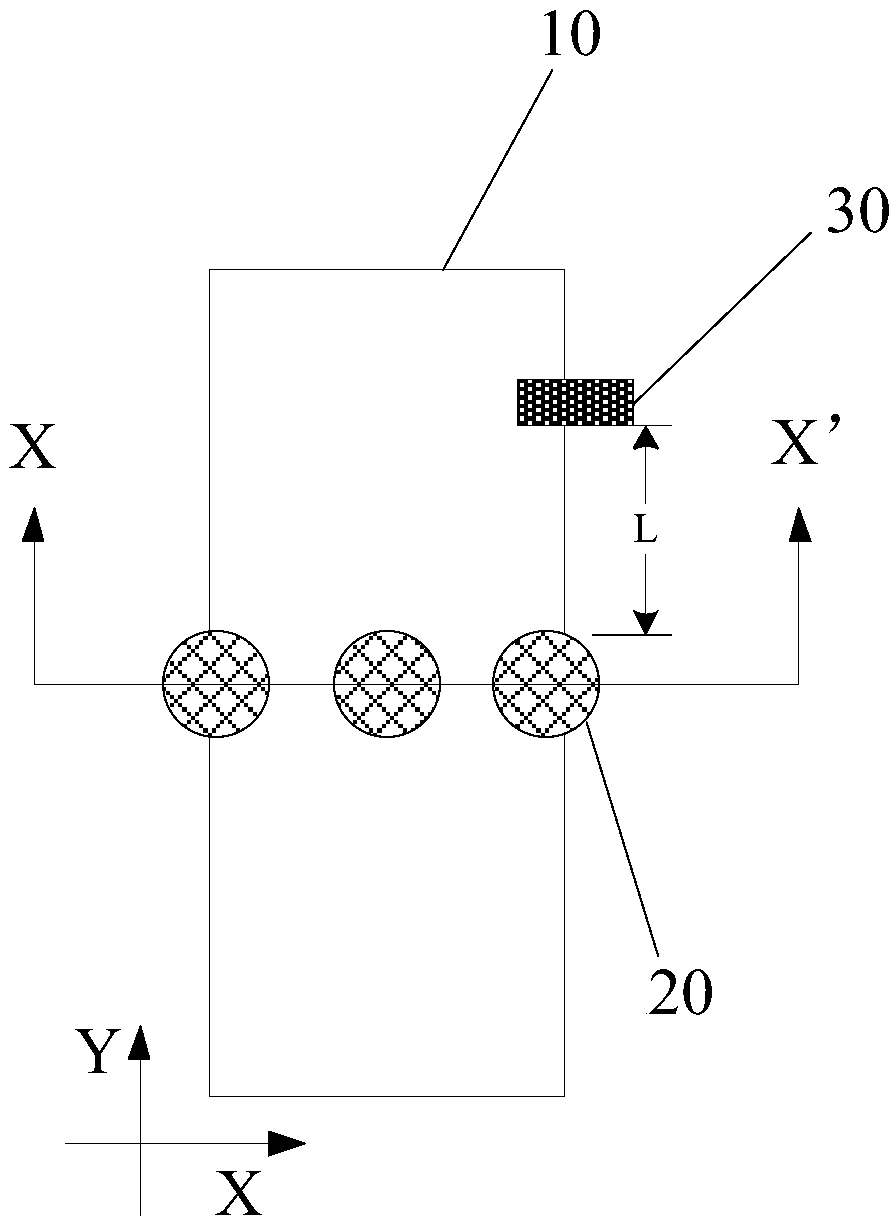
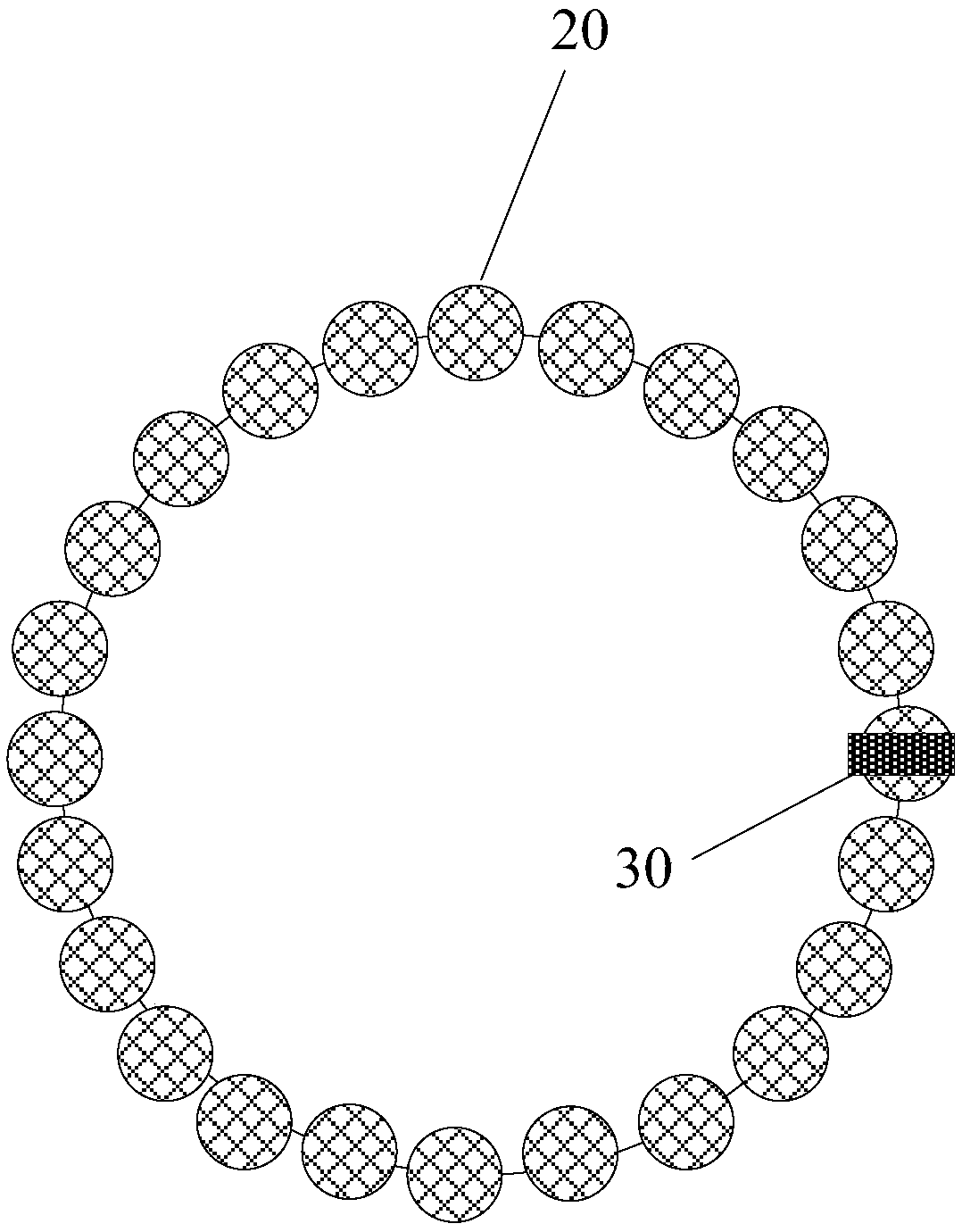
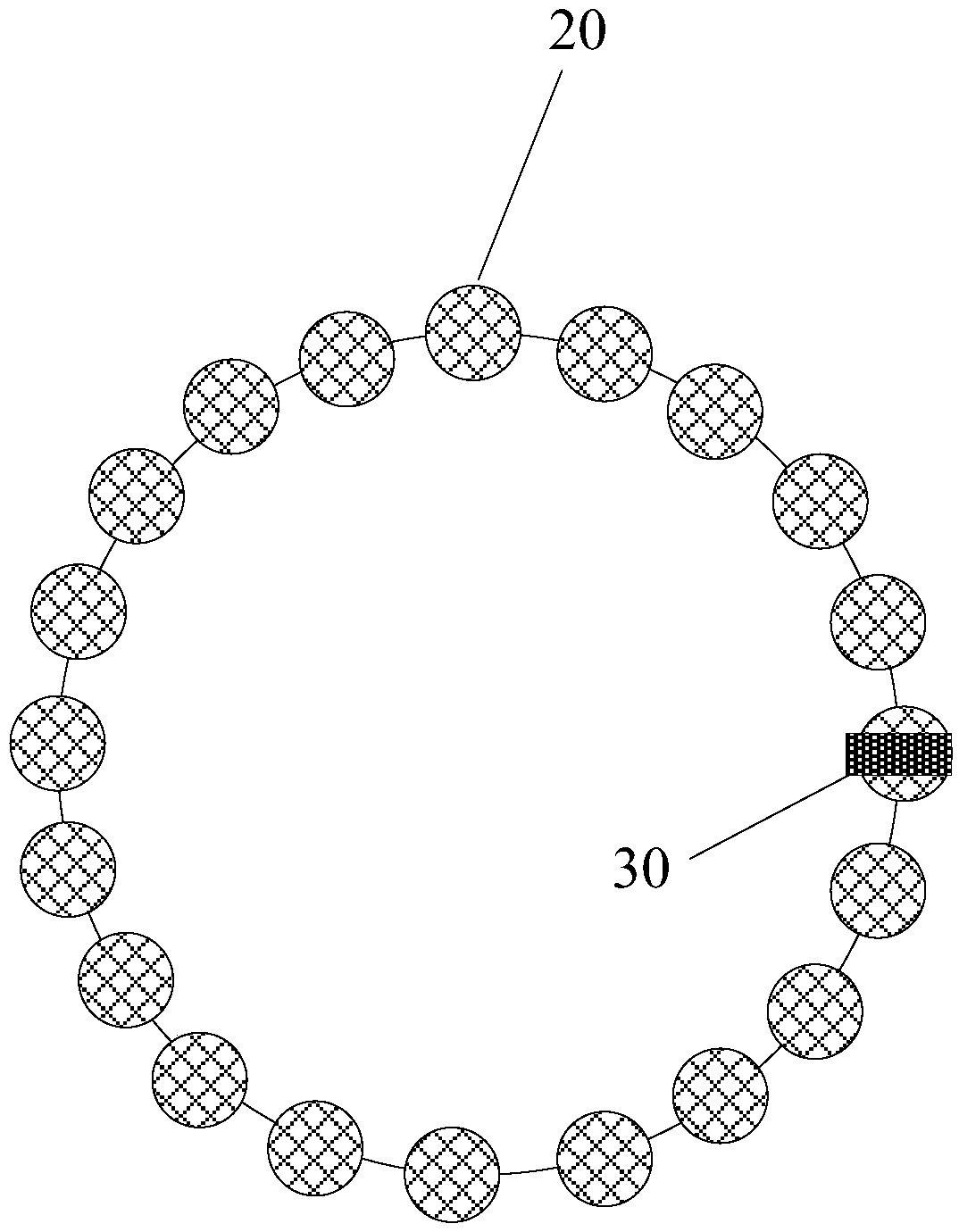
[0197] S701. Using a plurality of ultrasonic sensors arranged on the body of the robot to obtain ultrasonic detection data; execute step S703;
[0198] S702. Obtain laser detection data by using a laser sensor disposed on the body of the robot;
[0199] S703, performing screening and filtering processing on the ultrasonic detection data and the laser detection data respectively;
[0200] S704, converting the laser detection data into laser detection values; performing steps S705 and S708 respectively;
[0201] S705. According to the format requirements of the laser detection value, convert the ultrasonic detection data into a laser-like detection value; perform steps S706 and S707 respectively;
[0202] S706. According to the preset first data processing rule, according to the laser-like detection value and the laser detection value, determine the obstacle information around the robot; end the da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com