


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Binocular vision environment detection system and method based on tactile perception
A binocular vision and tactile perception technology, which is applied in image data processing, instruments, computing, etc., can solve the problems that low-resolution images cannot effectively extract image edge feature points, and cannot use disparity maps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0048] This embodiment discloses an environment perception system, which can also be an environment detection system based on binocular vision, or an environment detection system based on robot binocular vision perception. The system can be composed of the system of the present invention and / or other Alternative component implementations. For example, the system of the present invention is realized by using various components in the system of the present invention. In the case of no conflict or contradiction, the whole and / or part of the content of the preferred implementations of other embodiments may serve as supplements to this embodiment.
Embodiment approach
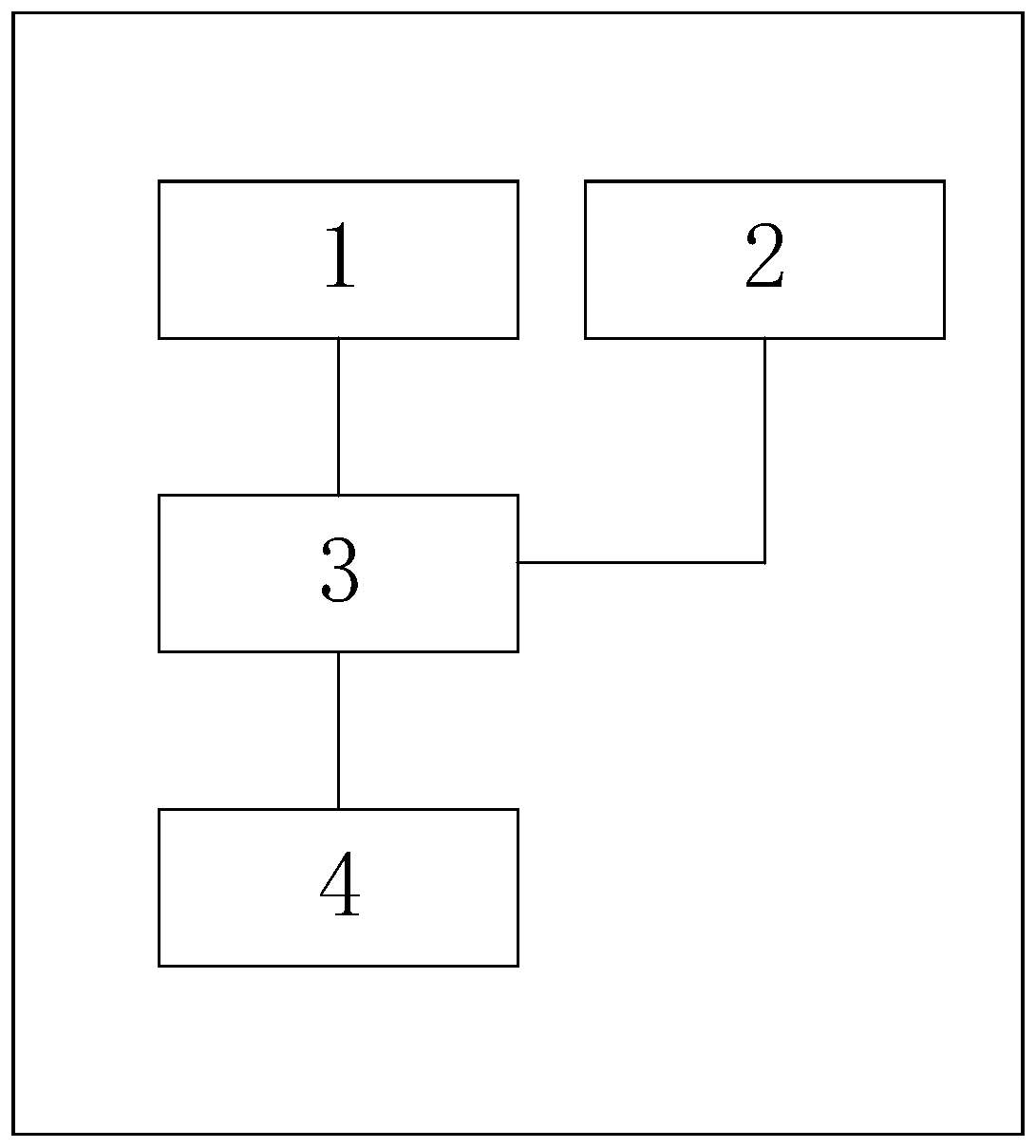
[0049] According to a preferred embodiment, a binocular vision environment detection system based on tactile perception at least includes a robot body used for archaeological excavation. Preferably, the robot body can be a hexapod robot. The main body of the robot can also be a multi-legged robot with four legs, eight legs or more legs. The main body of the robot can also be a multi-legged robot with manipulators.
[0050] Preferably, as figure 1As shown, the main body of the robot includes a camera 1 , a touch sensor 2 and a processor 3 . Preferably, the camera device 1 may be a camera device in the visible light band. The imaging device 1 may also be an infrared imaging device in the infrared band. Preferably, the main body of the robot further includes a plurality of imaging devices 1 at different positions for imaging. For example, two camera devices 1 in the same horizontal direction can obtain left and right visual image pairs. The main body of the robot may also i...
Embodiment 2
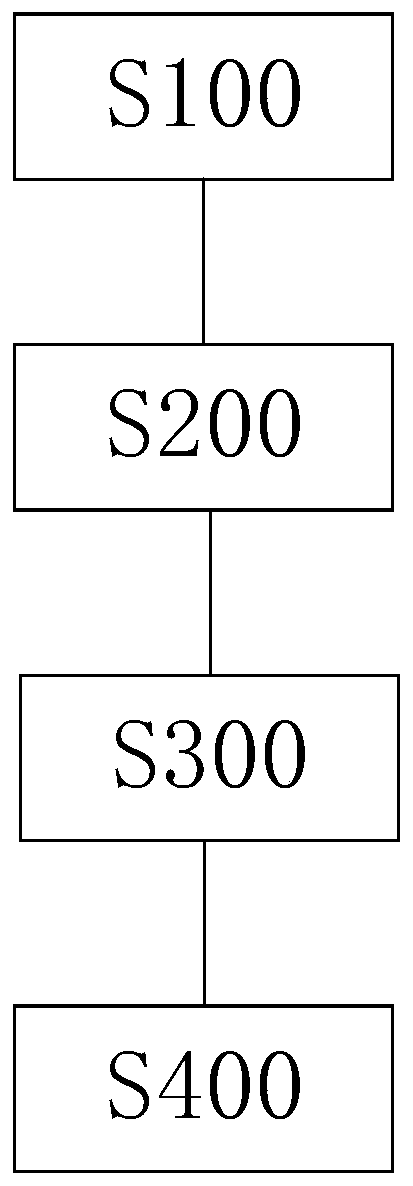
[0090] This embodiment is a binocular visual environment detection method based on tactile perception corresponding to Embodiment 1, and repeated content will not be repeated.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com