Scalable cluster particle robot self-organizing cooperative tracking control method
A tracking control and robot technology, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the complex structure of robots, it is difficult to large-scale cluster, it is difficult to eliminate lateral displacement deviation, Return to the expected trajectory and other issues to achieve the effect of reducing the difficulty of control and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
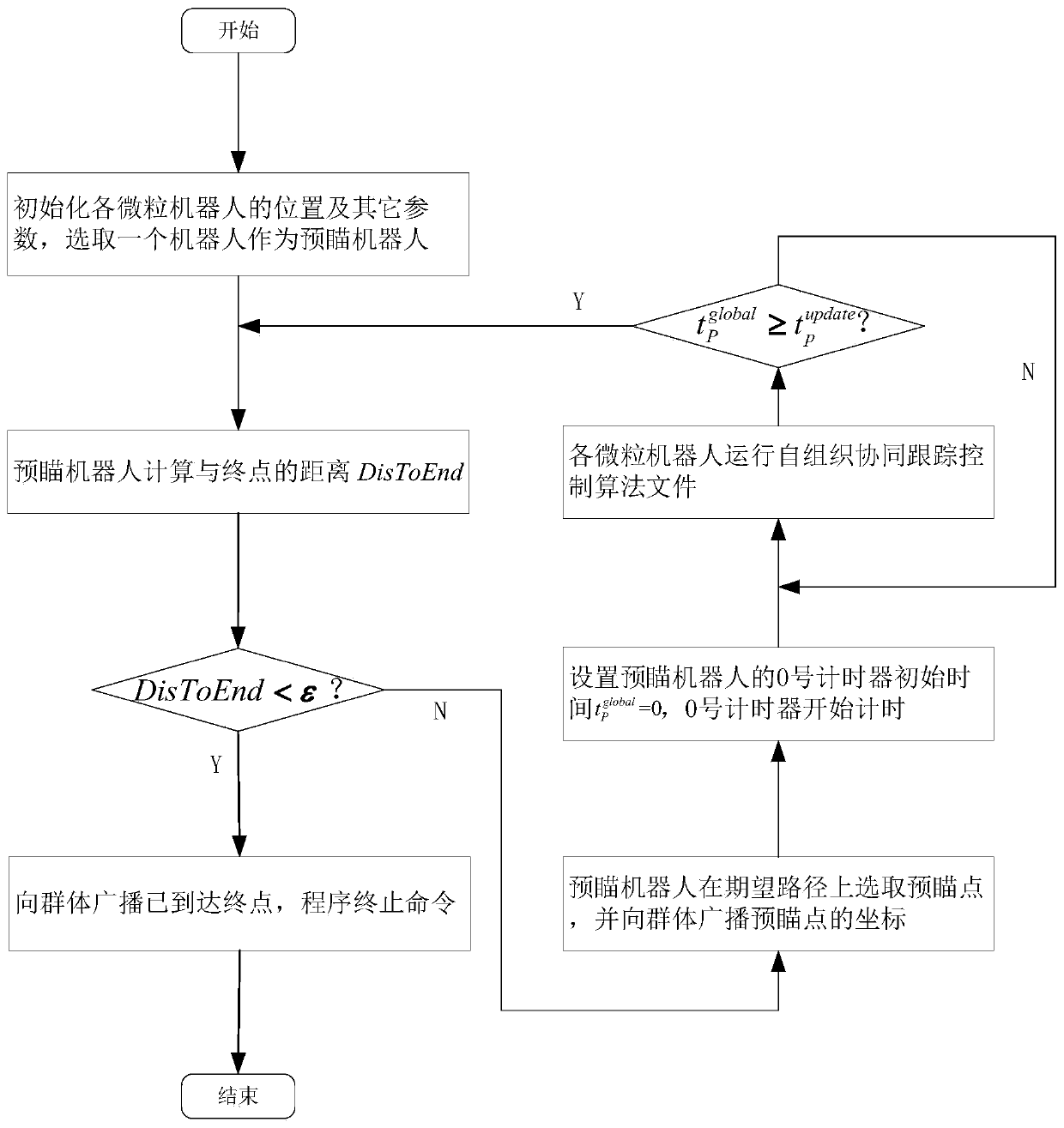
[0058] The self-organizing collaborative tracking control method of a scalable cluster particle robot according to the present invention, such as figure 1 As shown, including the following steps:
[0059] Step 1: Initialize the position of each particle robot, the expansion and contraction period T, and the motion control period T c , The number of a group of particle robots n, distance update cycle Preview point update cycle And select a robot as the preview robot, the preview robot needs to store the desired path to be tracked and the coordinates of the desired path start and end points in advance;
[0060] Step 2: Preview the robot to calculate its position (x p ,y p ) The distance from the end point DisToEnd; if DisToEndpre ,y pre ), and broadcast the coordinates of the preview point to the group, and set the initial time of the timer 0 of the preview robot Timer 0 starts timing and continues with the following steps;
[0061] Step 3: Each particle robot calculates the distanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com