Manual three-freedom-degree micro manipulator for minimally invasive surgery
A technology of minimally invasive surgery and micro-manipulators, which is applied in the field of manipulators, can solve problems such as inconvenient use for doctors, simple structure, and influence on operation stability and accuracy, and achieve the goal of improving work efficiency, stability, and scope of use. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
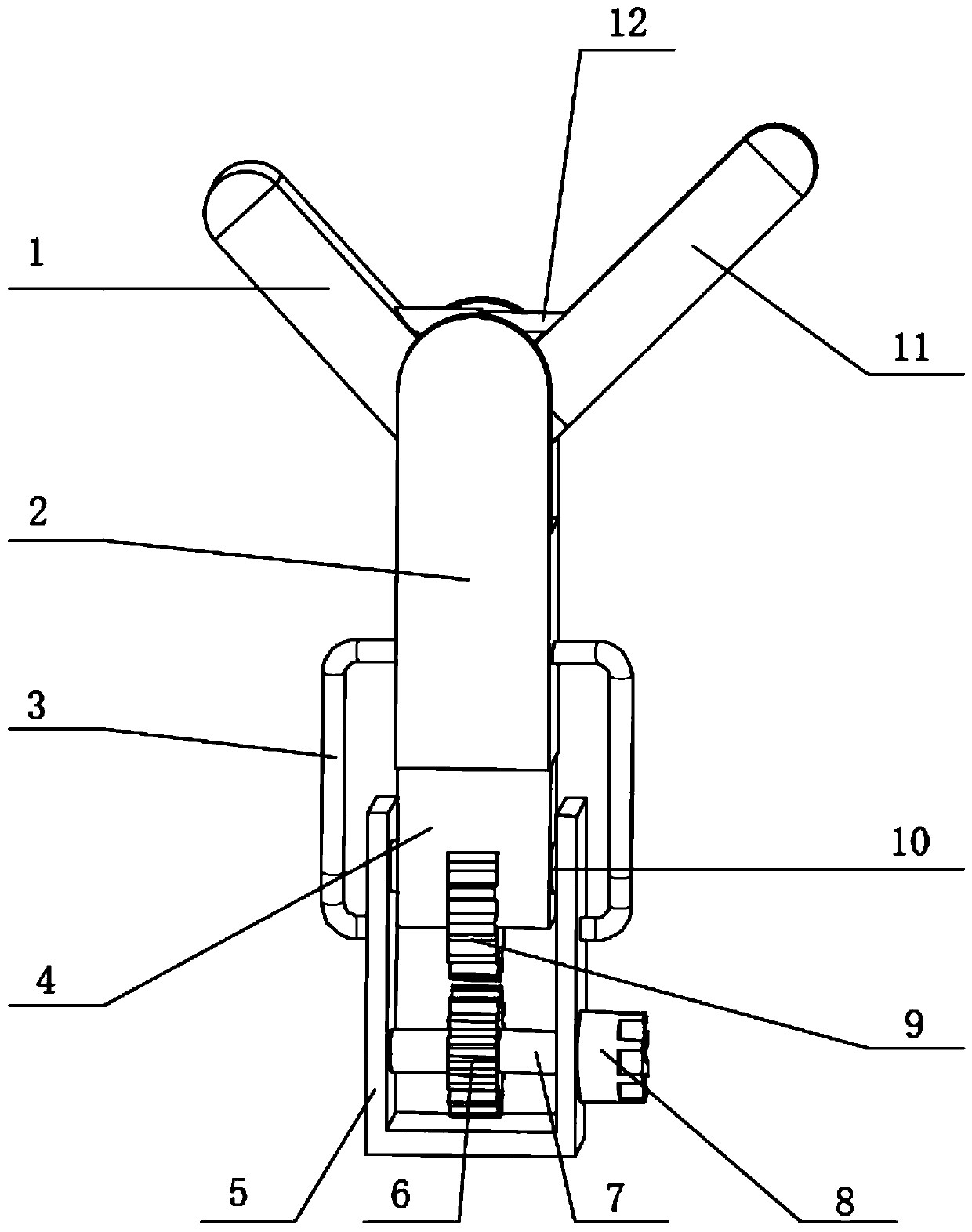
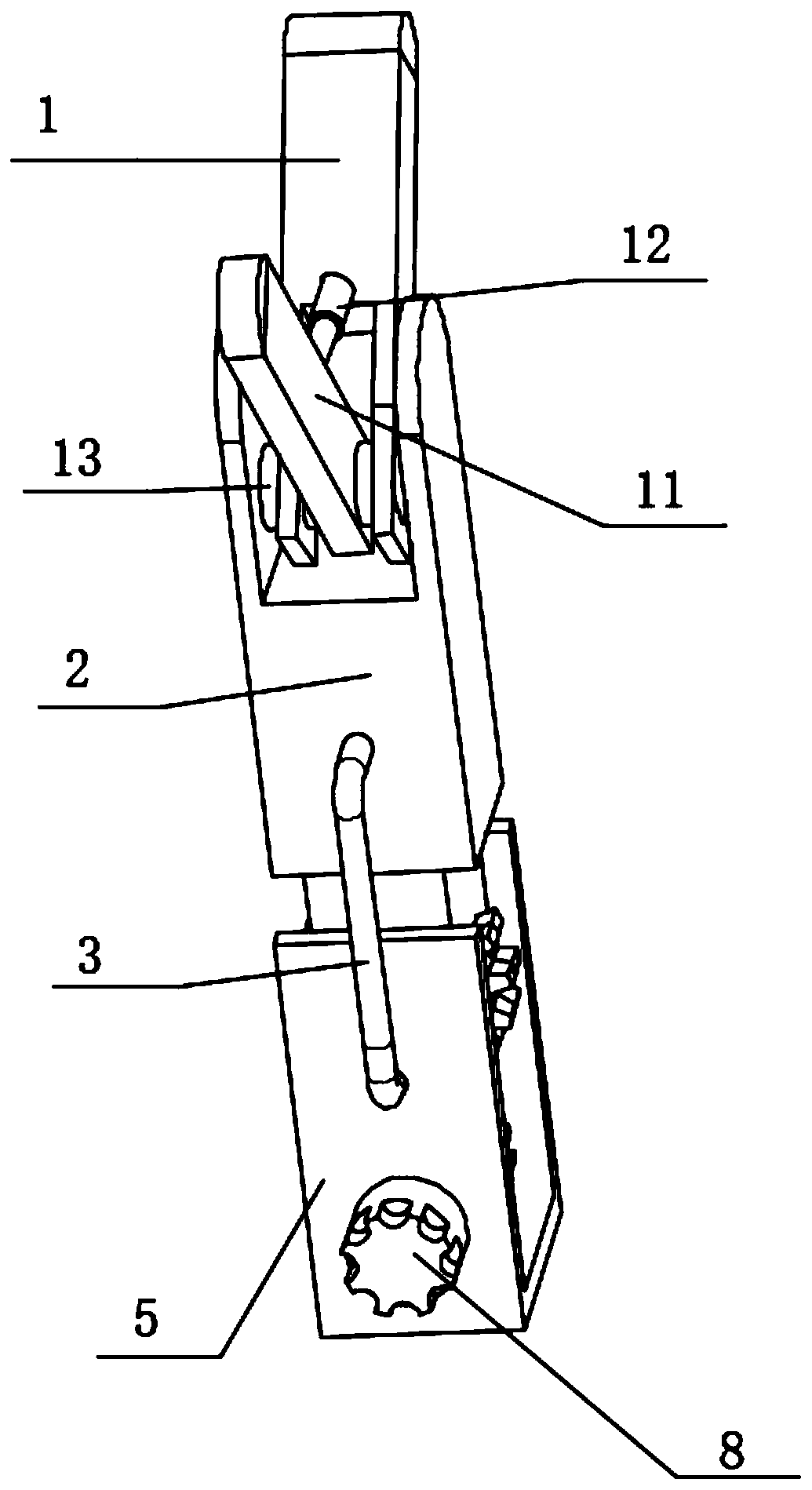
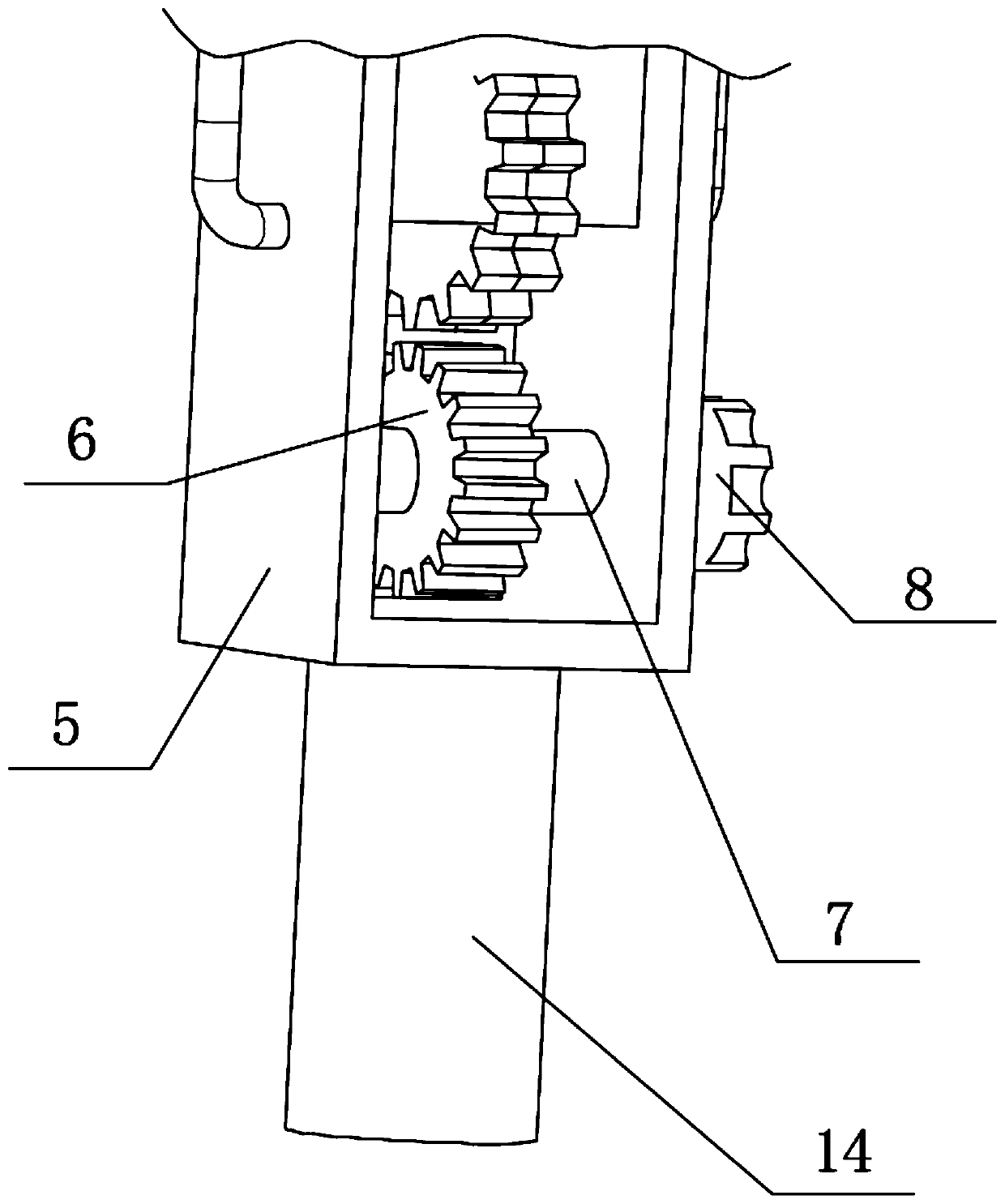
[0026] refer to Figure 1-3 , a manual three-degree-of-freedom micromanipulator for minimally invasive surgery, including a fixed block 2 and a connecting frame 5, the top of the inner wall on both sides of the connecting frame 5 is rotatably connected to the same horizontally placed rotating shaft 10, and the outer wall of the rotating shaft 10 is covered Connecting block 4 is connected, the outer wall of the top of connecting block 4 is fixedly connected with the outer wall of the bottom of fixed block 2, the bottom of the inner wall on both sides of connecting frame 5 is connected with the first connecting shaft 7 placed horizontally, and the outer wall of the first connecting shaft 7 is covered with Connected with driving gear 6, connecting block 4 bottom outer wall is equipped with driven gear 9, and driven gear 9 and driving gear 6 are meshed.
[0027] In the present invention, a rectangular groove is formed on the outer wall of the top of the fixed block 2, and the inne...
Embodiment 2
[0030] refer to Figure 1-4 , a manual three-degree-of-freedom micromanipulator for minimally invasive surgery, which also includes a circular limiting groove on the top outer wall of the circular column 14, and equidistantly distributed limiting rods 16 installed on the outer wall of the bottom of the connecting frame 5, the limiting rods 16 The circular outer wall is slidingly connected to the inner wall of the circular limiting groove, the stepper motor 15 is connected to a switch through a wire, and the switch is connected to a power supply through a wire.
[0031] Working principle: Compared with Example 1, by providing a circular column 14, a stepping motor 15 and a limit rod 16, the manipulator can be rotated, which improves the scope of use, and the limit rod 16 is in the circular limit groove Internal sliding for improved rotational stability.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com