Unmanned aerial vehicle tracking method based on twin neural network and attention model
An attention model and neural network technology, applied in the field of continuous tracking and visualization of single-target unmanned aerial vehicles, can solve the problems of poor discrimination and robustness of the tracker, achieve good generalization performance, universality, and enhanced representation Ability, the effect of facilitating the training process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
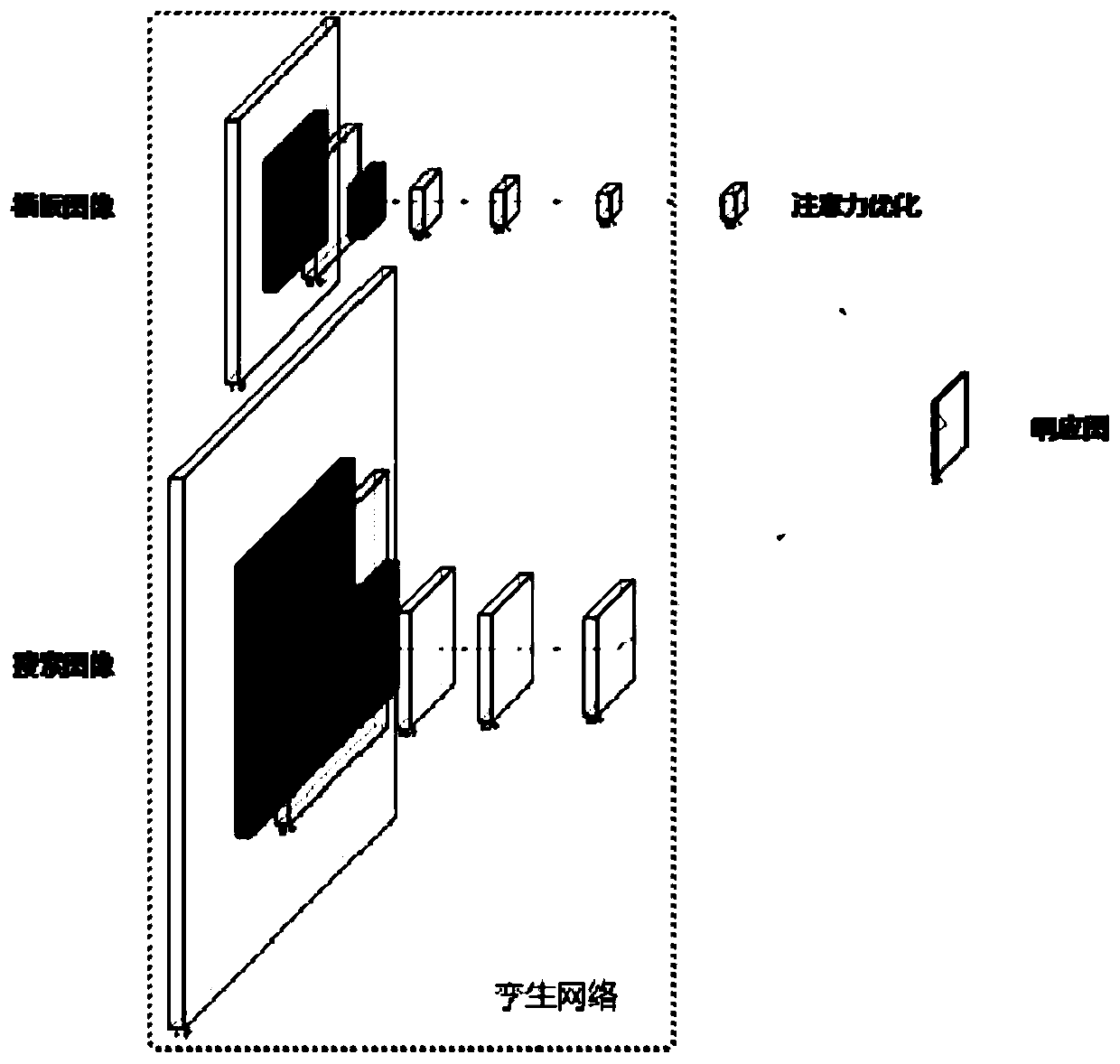
[0047]This embodiment provides a single UAV tracking method based on twin neural network and attention model, comprising the following steps:
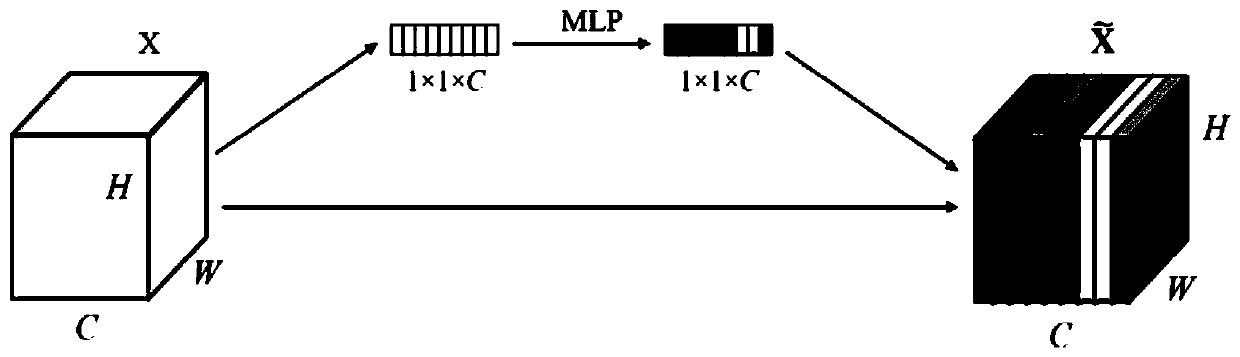
[0048] Step 1: Construct a twin neural network structure and a modular attention model, and use the attention model to enhance the features obtained by the twin network;
[0049] Using the twin neural network with shared parameters to extract the features of the template image Z and the image to be searched for X, the twin network performs the same transformation φ on the two input images to obtain the corresponding feature space F Z and F X :
[0050] f Z = φ(Z)
[0051] f X = φ(X)
[0052] The above transformation φ is a fully convolutional network, and the structure level is:
[0053] [C(96,11,2)-B-R-M(3,2)]-[C(256,5,1)-B-R-M(3,2)]-[C(384,3,1)-B-R]-[ C(384,3,1)-B-R]-[C(256,3,1)]
[0054] Among them, C represents the convolutional layer, B represents the batch normalization layer, R represents the ReLU activation layer, M rep...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com