Real-time filtering method of trace point sequences for multi-frame joint detection and tracking
A multi-frame joint detection and tracking algorithm technology, which is applied in the direction of measurement devices, re-radiation, and radio wave measurement systems, can solve the problem of low target tracking accuracy and achieve the effect of improving tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] For the convenience of those skilled in the art to understand the technical contents of the present invention, below in conjunction with the attached Figure 1-3 The content of the present invention is further explained.
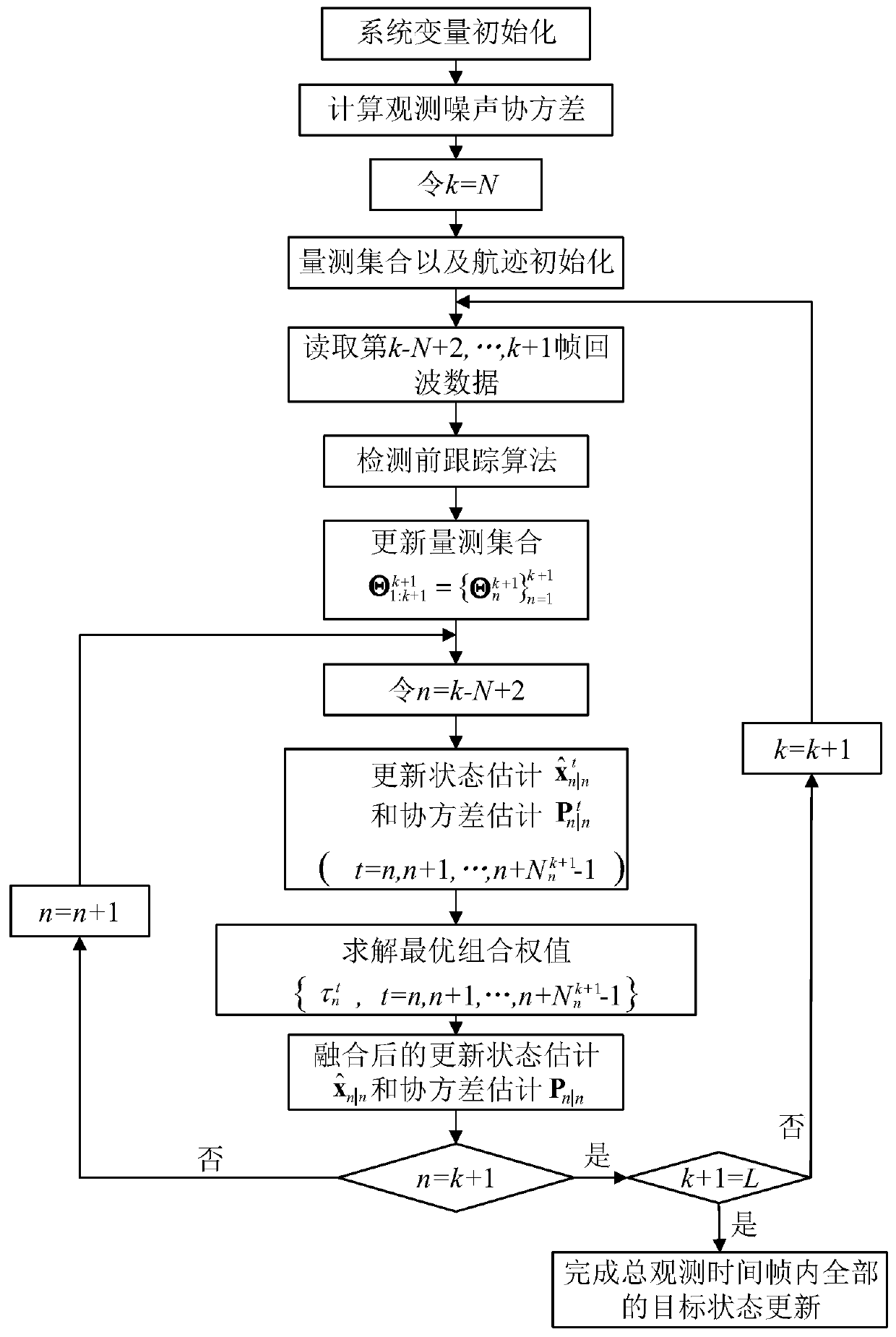
[0048] like figure 1 Shown is the overall flow chart of the present invention, the implementation process includes steps 1-6, and all steps and conclusions are verified to be correct on Matlab2017b.
[0049] Step 1: System parameter initialization,
[0050] Provide specific simulation parameters in the present embodiment: make the number of frames of the total observation data plane be L=20, the dimension of the observation data plane is Α=2, and the size is m x ×n y =70×70, the unit is cells; the number of jointly processed frames of the tracking-before-detection algorithm is N=6; the detection probabilities of the 6 frames are P D =[0.8058, 0.8922, 0.9024, 0.8901, 0.8832, 0.8287], the data plane sampling interval of each frame is T s =1s, ellip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com