Indoor map construction method for mobile robot integrated with multiple sensors
A mobile robot, indoor map technology, applied in the direction of instruments, structured data retrieval, geographic information database, etc., can solve the problem of low mapping accuracy, and achieve the effect of accurate pose information and low resolution accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Specific embodiments of the present invention are described below so that those skilled in the art can understand the present invention, but it should be clear that the present invention is not limited to the scope of specific embodiments. For those of ordinary skill in the art, as long as various changes Within the spirit and scope of the present invention defined and determined by the appended claims, these changes are obvious, and all inventions and creations using the concept of the present invention are included in the protection list.
[0046] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
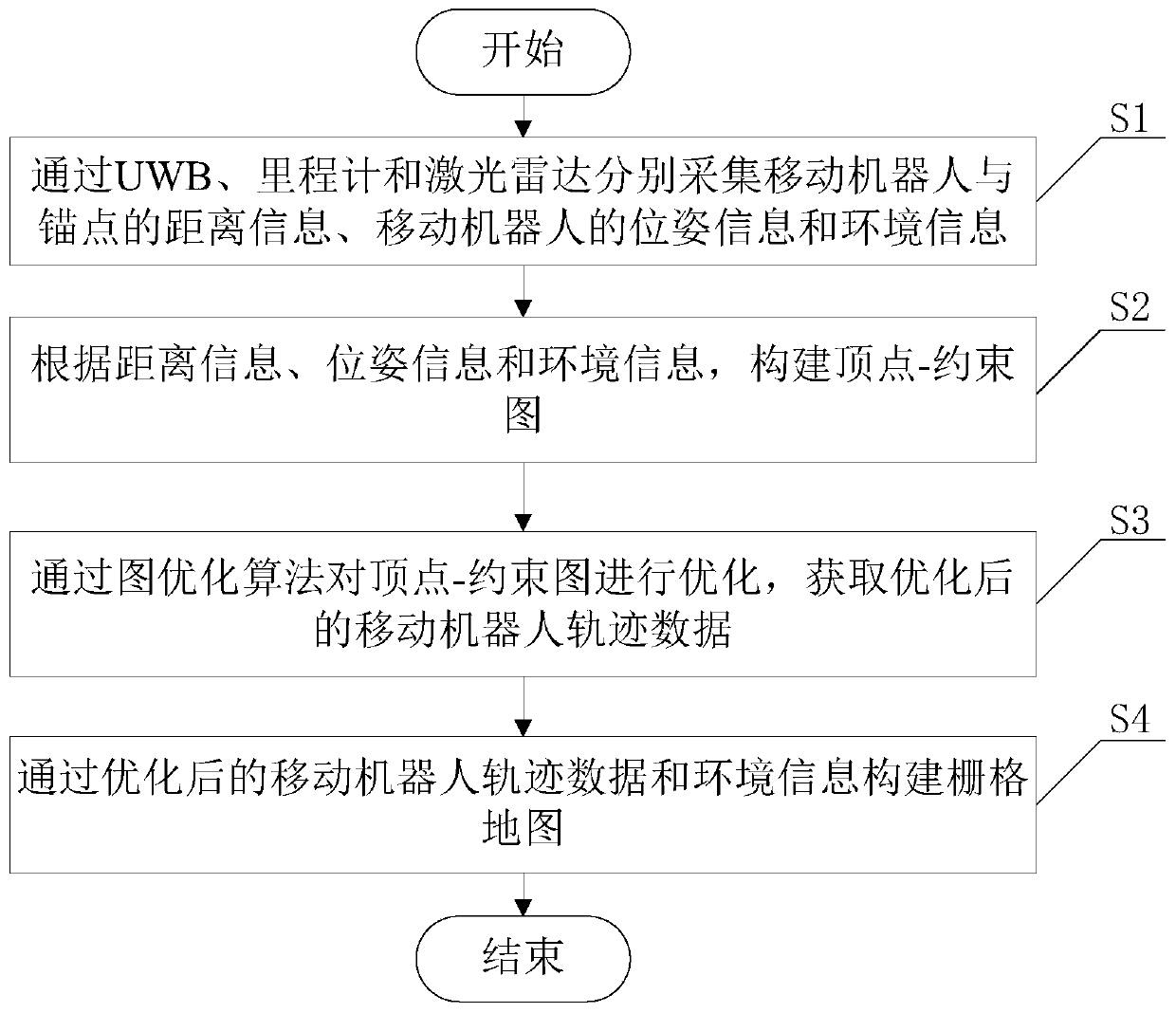
[0047] Such as figure 1 As shown, a multi-sensor fusion indoor map construction method for mobile robots includes the following steps:
[0048] S1. Collect the distance information between the mobile robot and the anchor point, the pose information and the environment information of the mobile robot throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com