Method for controlling double UAVs (unmanned aerial vehicles) to cooperatively hoist rod-shaped rigid load
A technology of dual UAVs and control methods, applied in general control systems, adaptive control, control/regulation systems, etc., can solve the problems of inability to fully apply UAV systems, difficulties in experimental verification, and a large number of variables. Good practical application significance, good load swing, and the effect of load swing suppression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
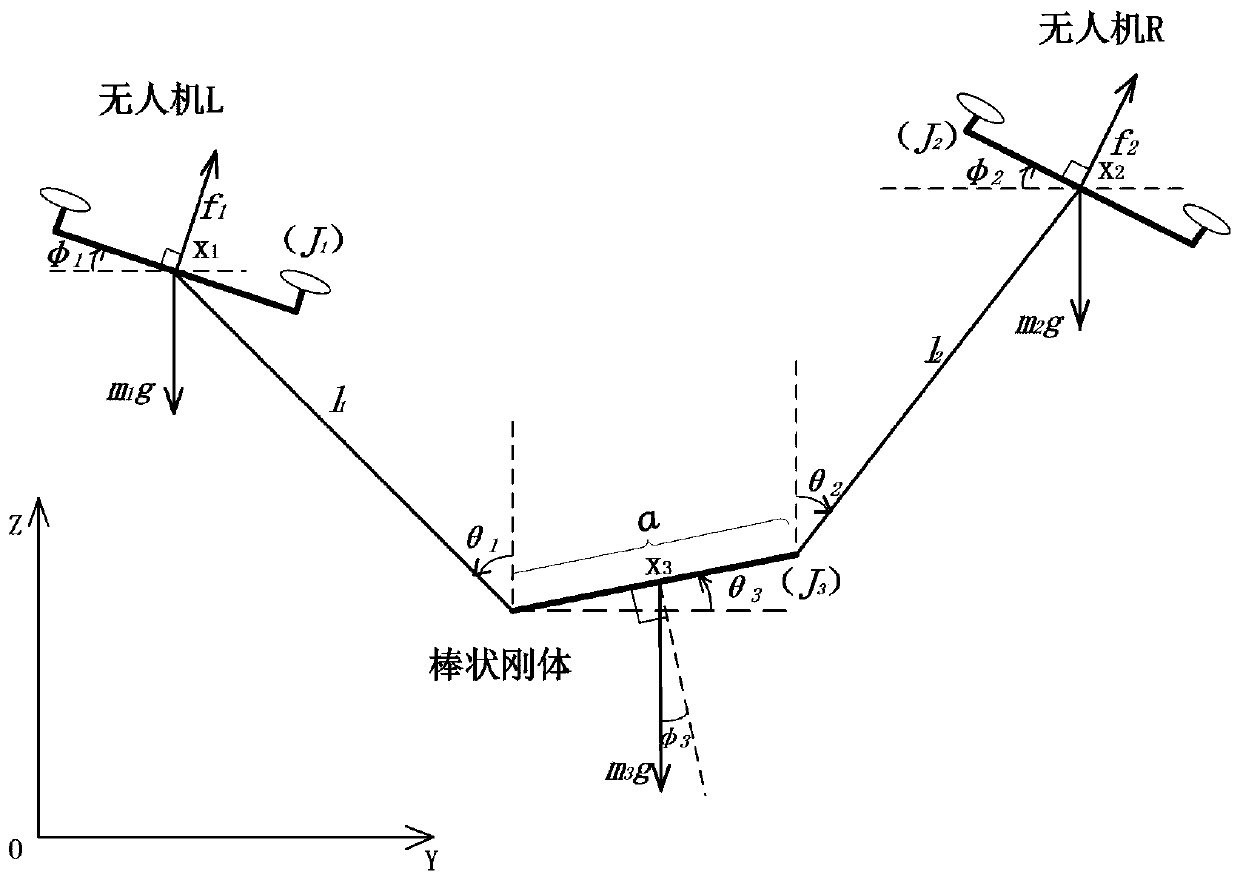
[0050] 1. Dynamic modeling of dual-UAV collaborative lifting system:
[0051]
[0052]
[0053]
[0054]
[0055]
[0056] Here, the selected system parameters are as follows:
[0057] m 1 = m 2 =3kg,m 3 =20kg,J 1 =J 2 =7kg·m 2 , l 1 = l 2 =2m, a=5m, g=9.8m / s 2
[0058] 2. Design of UAV outer loop controller
[0059] By deriving the outer loop Lyapunov function (21), the control input structure can be designed as follows:
[0060]
[0061]
[0062]
[0063]
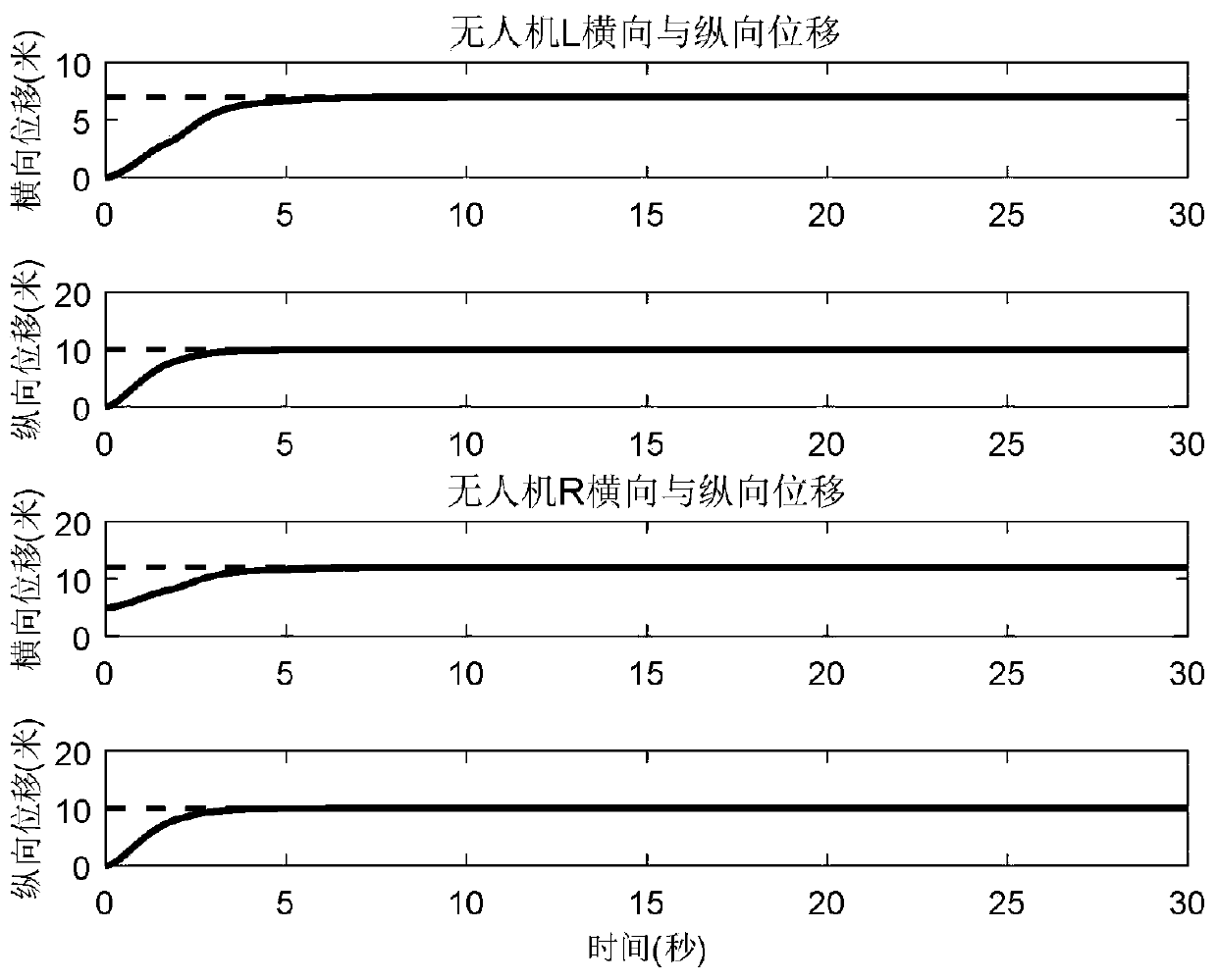
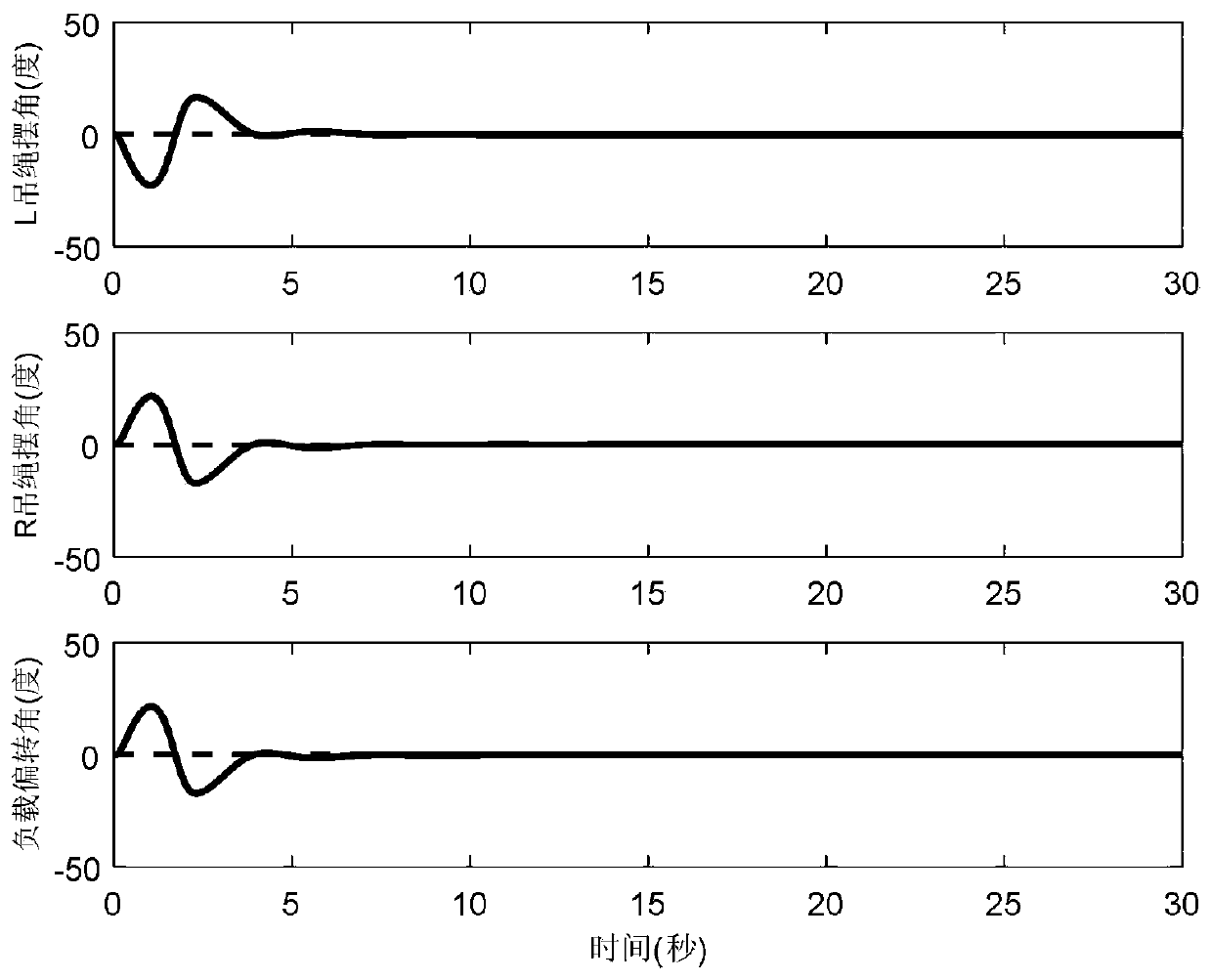
[0064] Among them, the expected positions of the two UAVs are set as [y d1 z d1 ] T =[7 10] T ,[y d2 z d2 ] T =[1210] T , and the expected angles of rope swing angle and load swing angle are θ 1d = θ 2d = θ 3d = 0°. k a1 ,k a2 ,k d1 ,k d2 ,k d3 ,k d4 is a positive control gain, using the control inputs (23) and (24) designed by the outer loop controller, it can realize the fixed-point hovering of the drone, eliminate the load swing and control the distance between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com