Puncture operation navigation method based on motion capture and mixed reality technologies
A mixed reality technology and surgical navigation technology, applied in the field of puncture surgery navigation, can solve the problems of influence, influence efficiency, lack of objective data and information of virtual models of surgical instruments, etc., and achieve the effects of high efficiency, low cost, and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with illustrations and specific embodiments.
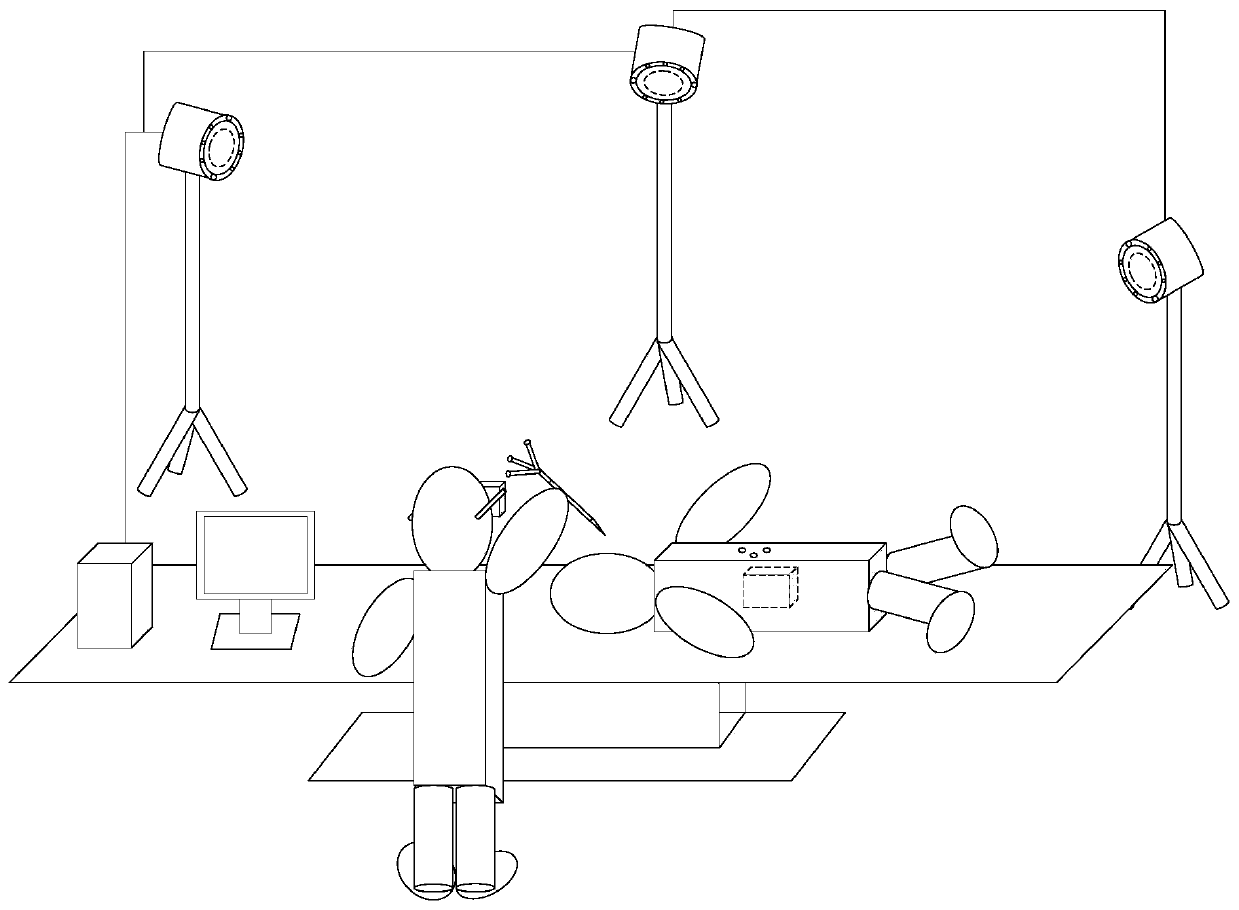
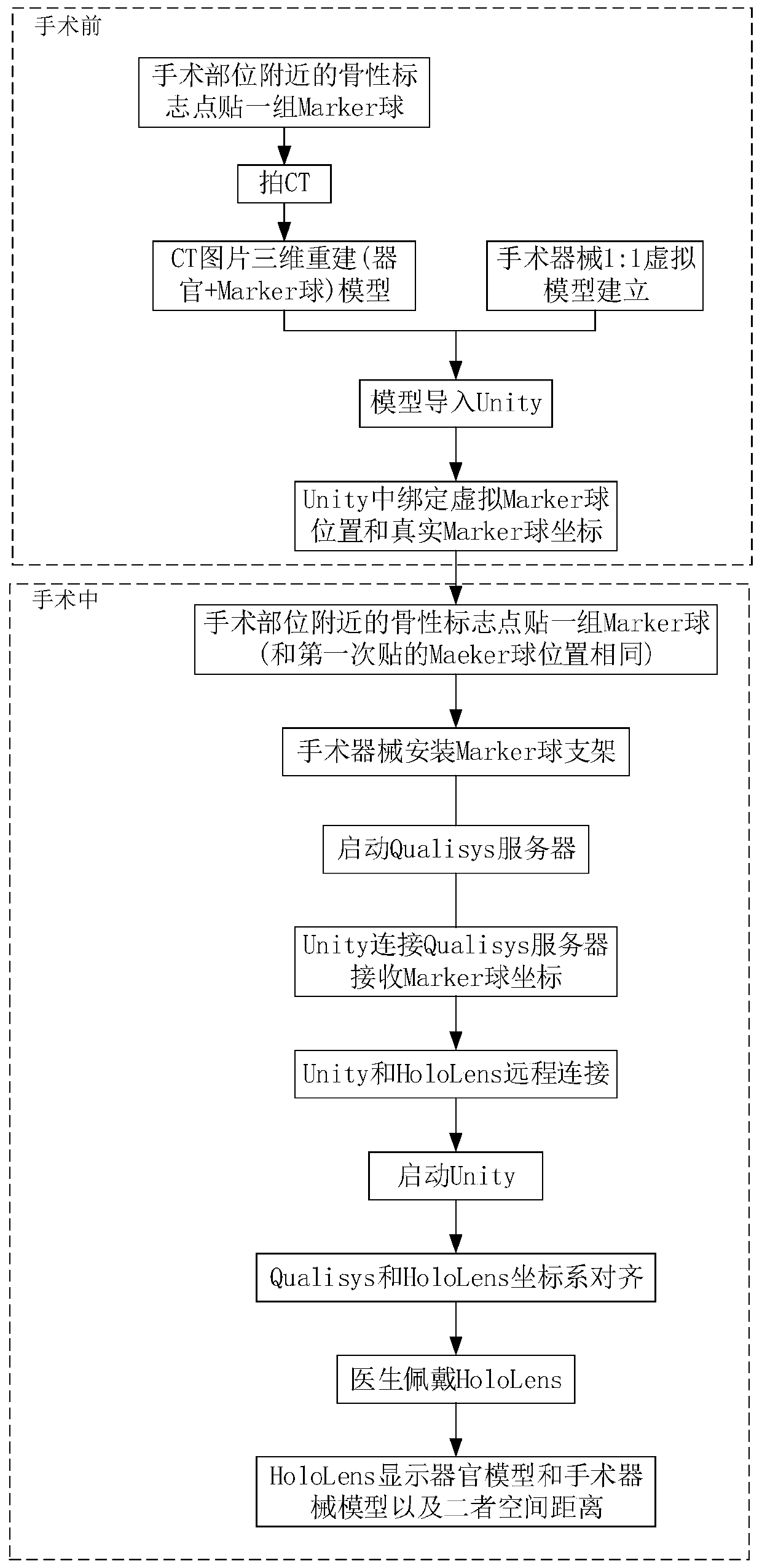
[0034] Such as figure 1 As shown, a kind of puncture surgery navigation method based on motion capture and mixed reality technology proposed by the present invention includes the following steps:
[0035] S1. Stick marker balls on the physiological points on the skin surface around the kidneys that need to be punctured;
[0036] S2. Use the Qualisys optical motion capture system to capture the spatial position coordinates of the marker ball. The Qualisys optical motion capture system can capture the real-time position accuracy of the submillimeter level. The patient chooses the bony position to paste the marker on the place where augmented reality surgical navigation is required. The ball captures the spatial position of the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com