Method for predicting pedestrian trajectory by robot based on social network model
A trajectory prediction and social network technology, applied in biological neural network models, instruments, motor vehicles, etc., can solve problems such as low work efficiency, low precision of robot path planning, poor obstacle avoidance effect, etc., to achieve comity and efficiency problem effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
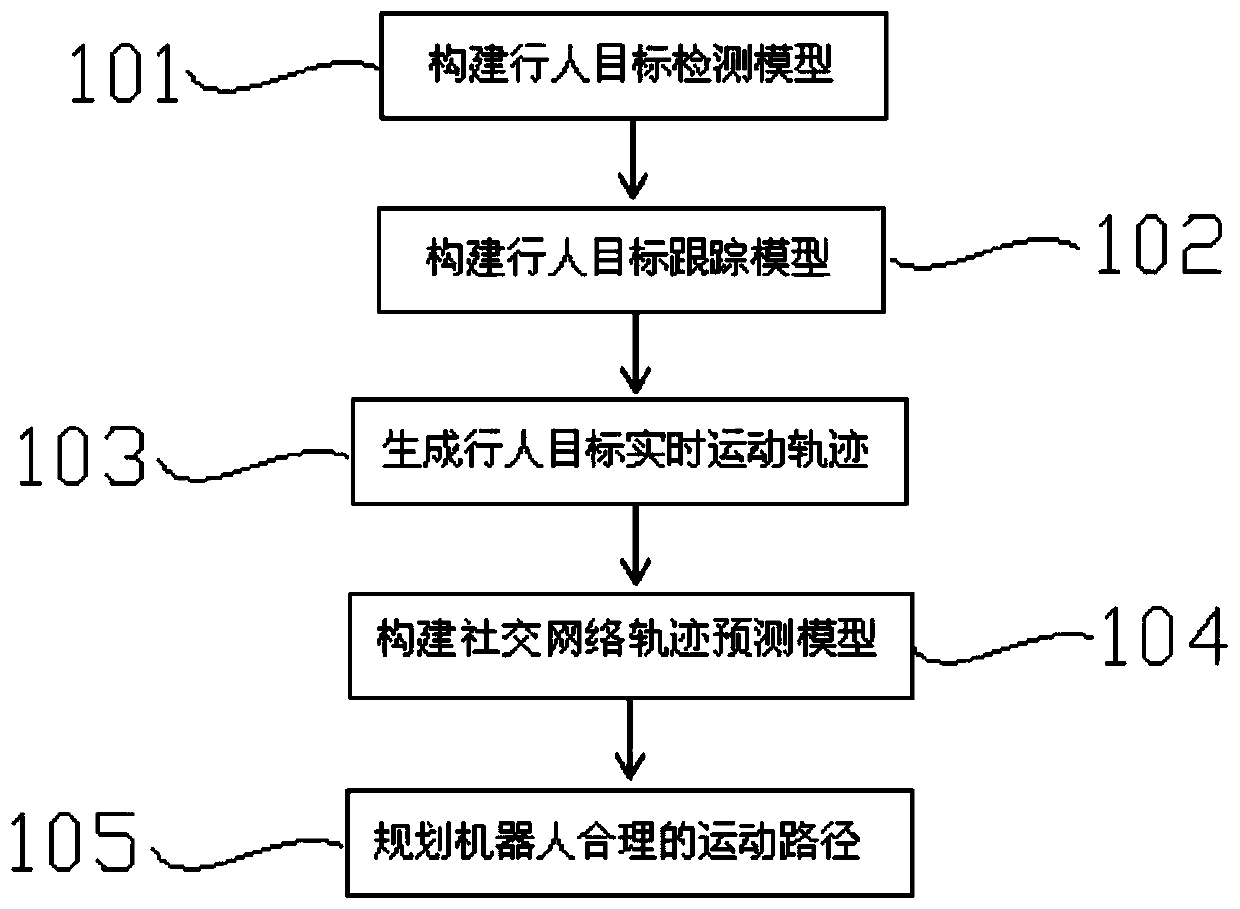
[0034] Embodiment 1 discloses a method for predicting pedestrian trajectories by a robot based on a social network model, comprising the following steps:
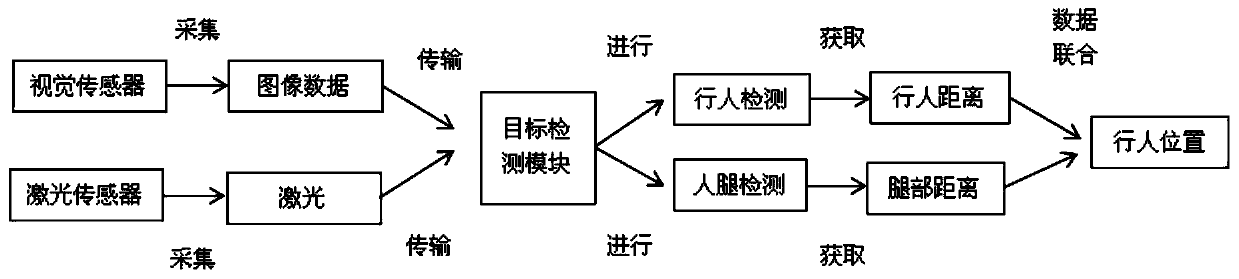
[0035] Step 101: Build a pedestrian target detection model. The target detection module detects pedestrian targets through the data collected by the sensors carried by the robot, obtains the position of pedestrian targets, and constructs a pedestrian target detection model. Follow the steps below:
[0036] First, the target detection module obtains the distance between the pedestrian target and the target detection module;
[0037] Then, the target detection module estimates the position of the pedestrian target according to the distance between the pedestrian target and the target detection module, and constructs a pedestrian target detection model;
[0038] Wherein, the target detection module obtains the distance between the pedestrian target and the target detection module specifically includes the following steps:
...
Embodiment 2
[0051] Embodiment 2 discloses a method for predicting pedestrian trajectories by a robot based on a social network model, such as figure 1 shown, including the following steps:
[0052] Step 101: Build a pedestrian target detection model. The target detection module detects pedestrian targets through the data collected by the sensors carried by the robot, and builds a pedestrian target detection model. The sensors are visual sensors and laser sensors;
[0053] Step 102: Build a pedestrian target tracking model. The target tracking module performs real-time tracking and position update of the pedestrian targets detected by the pedestrian target detection model in real time, and outputs the real-time position of the pedestrian targets, constructs the pedestrian target tracking model, and constructs the pedestrian target tracking model. Including the following steps:
[0054] First, the target tracking module synchronizes the timestamps of the sensors;
[0055] Then, the target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com