Lower limb robot dynamics simulation platform and simulation method fusing balance strategy
A technology of dynamics simulation and robotics, applied in instruments, manipulators, computing, etc., can solve problems such as low development efficiency and difficulty in building a multi-functional simulation platform for lower limb robots, and achieve shortened development cycle, easy expansion, and optimized system dynamics The effect of the parameter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
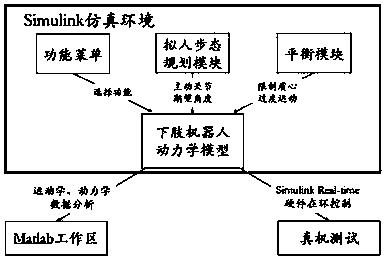
[0047] Using the above-mentioned simulation platform to carry out the dynamic test simulation of the paraplegic walking aid lower limb exoskeleton, specifically includes the following steps:
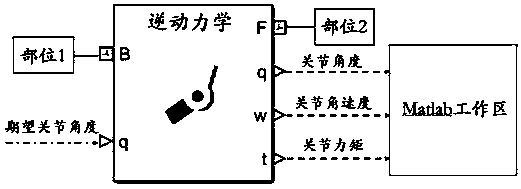
[0048] S1 selects the dynamic test simulation function through the function menu, and the simulation platform calls the active joint sub-module containing the joint inverse dynamic relationship, such as figure 2 shown;
[0049] S2 constructs a virtual controlled object, which includes the torso and the thighs, calves and feet on both sides, and contains a total of 8 degrees of freedom, 4 degrees of freedom on each side, specifically as follows Figure 4 As shown, each side contains three active degrees of freedom for flexion and extension of the hip, knee and ankle in the sagittal plane and passive degrees of freedom for ankle varus;
[0050] The S3 anthropomorphic gait planning module uses the eighth-order sine sum method in the curve fitting toolbox to fit the actual joint angles mea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com