A method for identifying and compensating for missing vehicle trajectories
A vehicle trajectory and compensation method technology, applied in the field of Internet of Vehicles, can solve the problems of manual compensation, such as heavy workload, missing driving trajectory, and low efficiency, and achieve the effects of simple and efficient compensation method, accurate and reasonable judgment, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
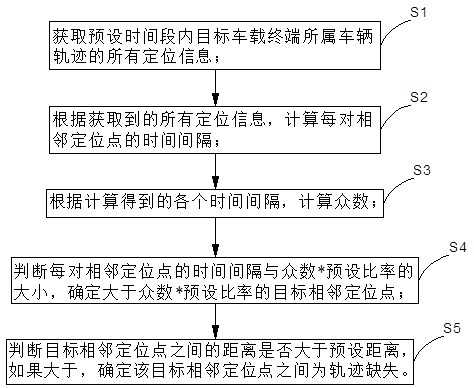
[0047] Such as figure 1 As shown, this embodiment discloses a vehicle track missing identification method, comprising the following steps:
[0048] S1: Obtain all positioning information of the trajectory of the vehicle to which the target vehicle-mounted terminal belongs within a preset time period; wherein, the positioning information includes coordinate information of the positioning point and corresponding time information of the positioning point.
[0049] S2: Calculate the time interval between each pair of adjacent positioning points according to all the positioning information obtained;
[0050] S3: Calculate the mode according to each calculated time interval;
[0051] Among them, the mode is the most common time interval among adjacent positioning points. Since various types of terminals have different transmission frequencies, and the transmission frequency of the same terminal will fluctuate up and down in different situations, the calculated mode is compared with...
Embodiment 2
[0055] The present invention also discloses a vehicle track loss compensation method. The method first uses the track loss identification method described above to determine the track loss. The track loss compensation method includes:
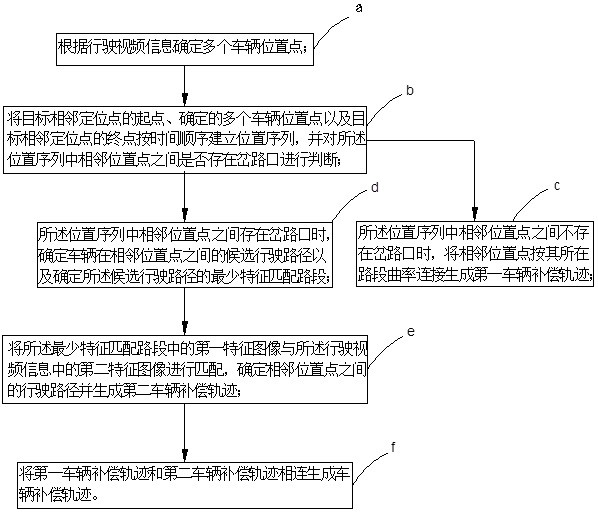
[0056] Determine the vehicle compensation trajectory between the adjacent positioning points of the target whose trajectory is missing according to the preset path determination method; in the embodiment of the present invention, it specifically includes:
[0057] The electronic map is invoked to plan the path between the adjacent positioning points of the target whose trajectory is missing to obtain the planned path; wherein, the electronic map is pre-stored in the management server, and the electronic map has the function of planning the path. Obtain the historical driving trajectory between the target adjacent positioning points where the vehicle trajectory of the target vehicle-mounted terminal is missing within the preset time period, and p...
Embodiment 3
[0059] In the embodiment of the present invention, the method for determining the vehicle compensation trajectory between the target adjacent anchor points with missing trajectories is different from the method for determining the vehicle compensation trajectory between the target adjacent anchor points with missing trajectories in Embodiment 2, in that The method is: obtain all historical driving trajectories and corresponding historical time intervals between target adjacent positioning points with missing vehicle trajectories to which the target vehicle-mounted terminal belongs within a preset time period; The time interval between the positioning points is calculated as the difference, and the historical driving trajectory corresponding to the historical time interval closest to zero in the calculation result is determined as the vehicle compensation trajectory. Normally, since the time required for the vehicle to travel on the same path is basically the same, this embodime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com