Method and system for tracking underwater robot in real time, and unmanned relay equipment
An underwater robot and real-time tracking technology, which is applied in the direction of control/regulation system, instrument, non-electric variable control, etc., can solve the problems of autonomous underwater robot loss, poor real-time tracking, poor flexibility, etc., and achieve accurate and reasonable control of navigation trajectory , Real-time tracking effect is good, and the effect of ensuring positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the objects, technical solutions and advantages of the present invention more apparent, exemplary embodiments according to the present invention will be described in detail below with reference to the accompanying drawings. Apparently, the described embodiments are only some embodiments of the present invention, rather than all embodiments of the present invention, and it should be understood that the present invention is not limited by the exemplary embodiments described here.
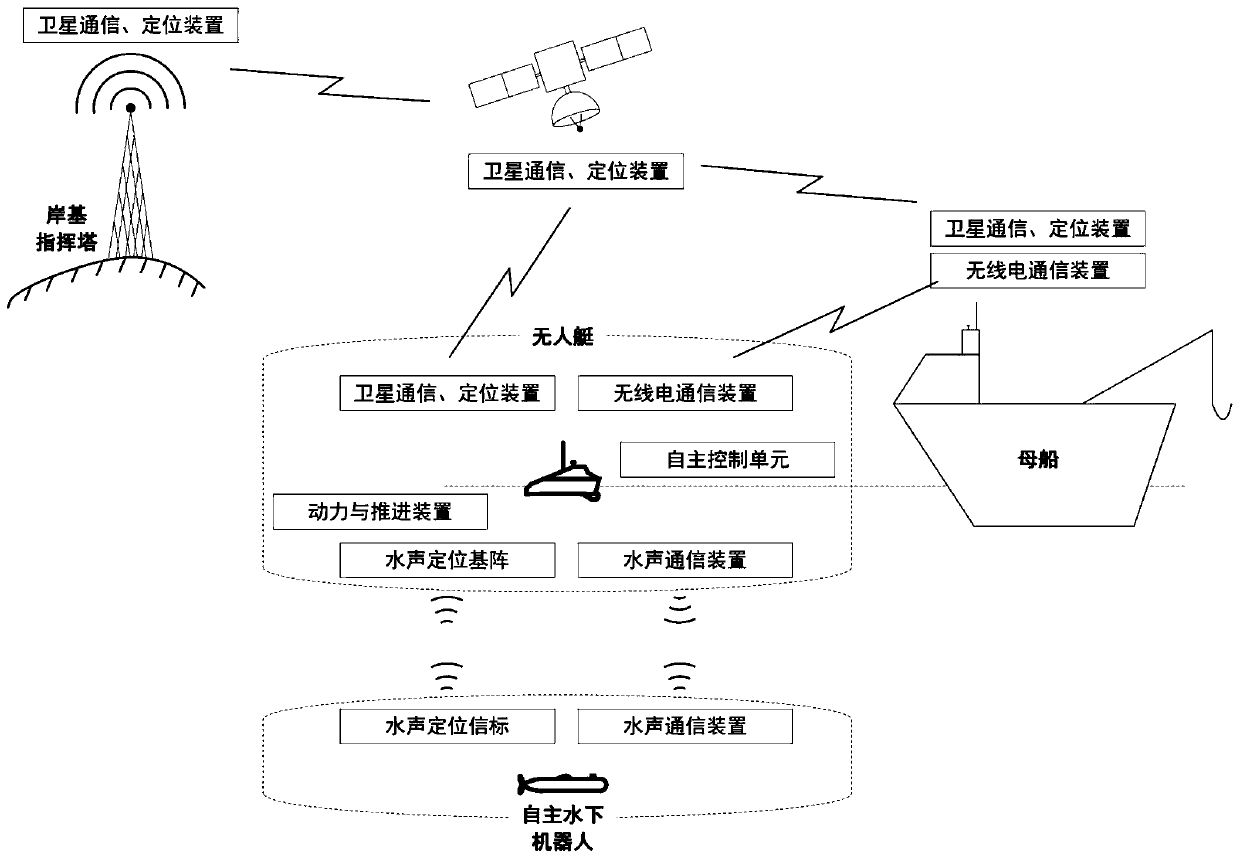
[0046] Unmanned Surface Vessel (USV, Unmanned Surface Vessel) has become one of the hot research directions of marine ships in recent years because of its small size, fast speed, good safety and high degree of intelligence. These fields have extremely broad application prospects. It can find its own path and avoid obstacles on the water surface through autonomous control to complete various water tasks. It can also be installed on large aircraft or ships to assist large transp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com