An adaptive fault-tolerant control method for a free-floating space manipulator
A space manipulator, fault-tolerant control technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as uncertainty, inability to obtain accurate actuator fault information and system nonlinearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
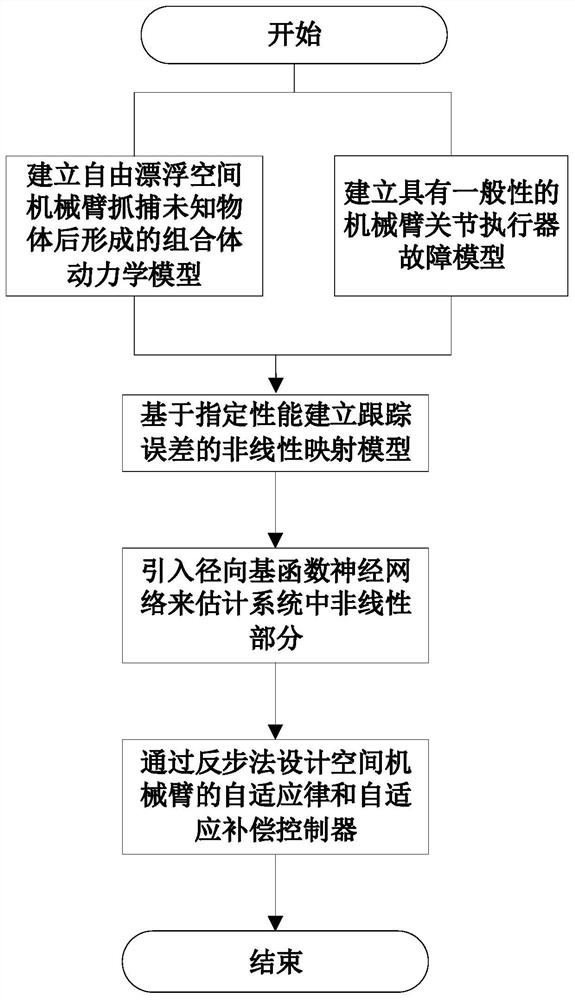
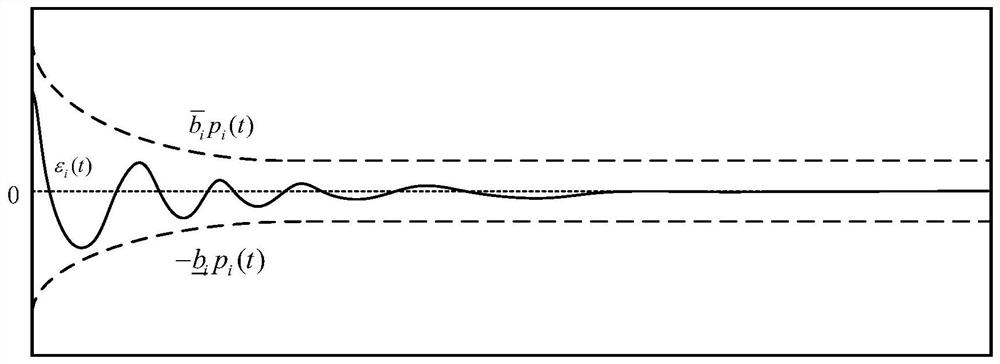
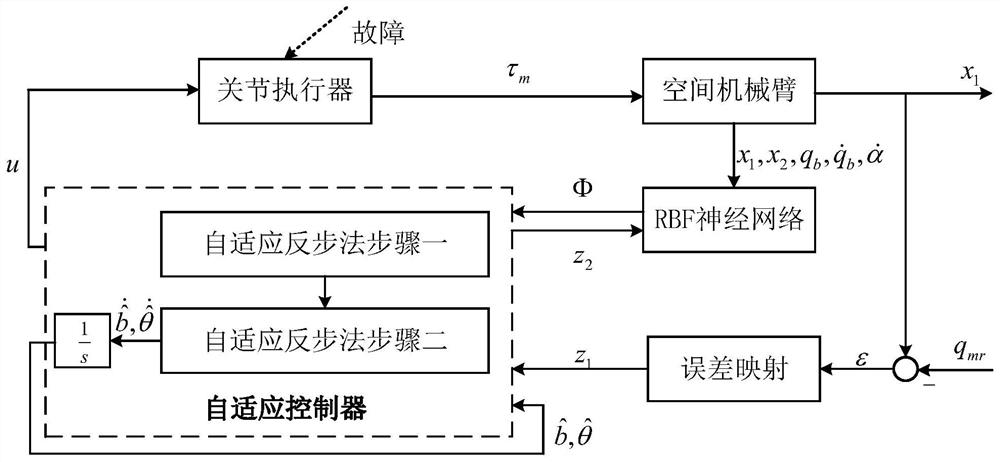
[0045] like figure 1 As shown, the steps of an adaptive fault-tolerant control method for a free-floating space manipulator with specified tracking performance of the present invention are as follows: the first step is to establish a dynamic model of the assembly formed by the free-floating space manipulator after capturing an unknown object and a A general manipulator joint actuator failure model; the second step is figure 2 The shown preset specified performance function establishes the error value of the joint angle of the manipulator after nonlinear mapping, which is image 3 The error mapping part in ; the third step introduces radial basis function neural network to estimate the unknown nonlinear part of the system, this step image 3 In the RBF (RadialBasis Function) neural network part; the fourth step is to design the adaptive law and adaptive compensation controller of the space manipulator through the backstepping method, which is image 3 in the Adaptive Control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com