Automatic guiding system and method applied to unmanned freight car in enclosed place
An unmanned and automatic guidance technology, applied in the control/regulation system, vehicle position/route/altitude control, motor vehicles and other directions, can solve the problems of high transformation cost and low accuracy of automatic driving navigation, and achieve flexible control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
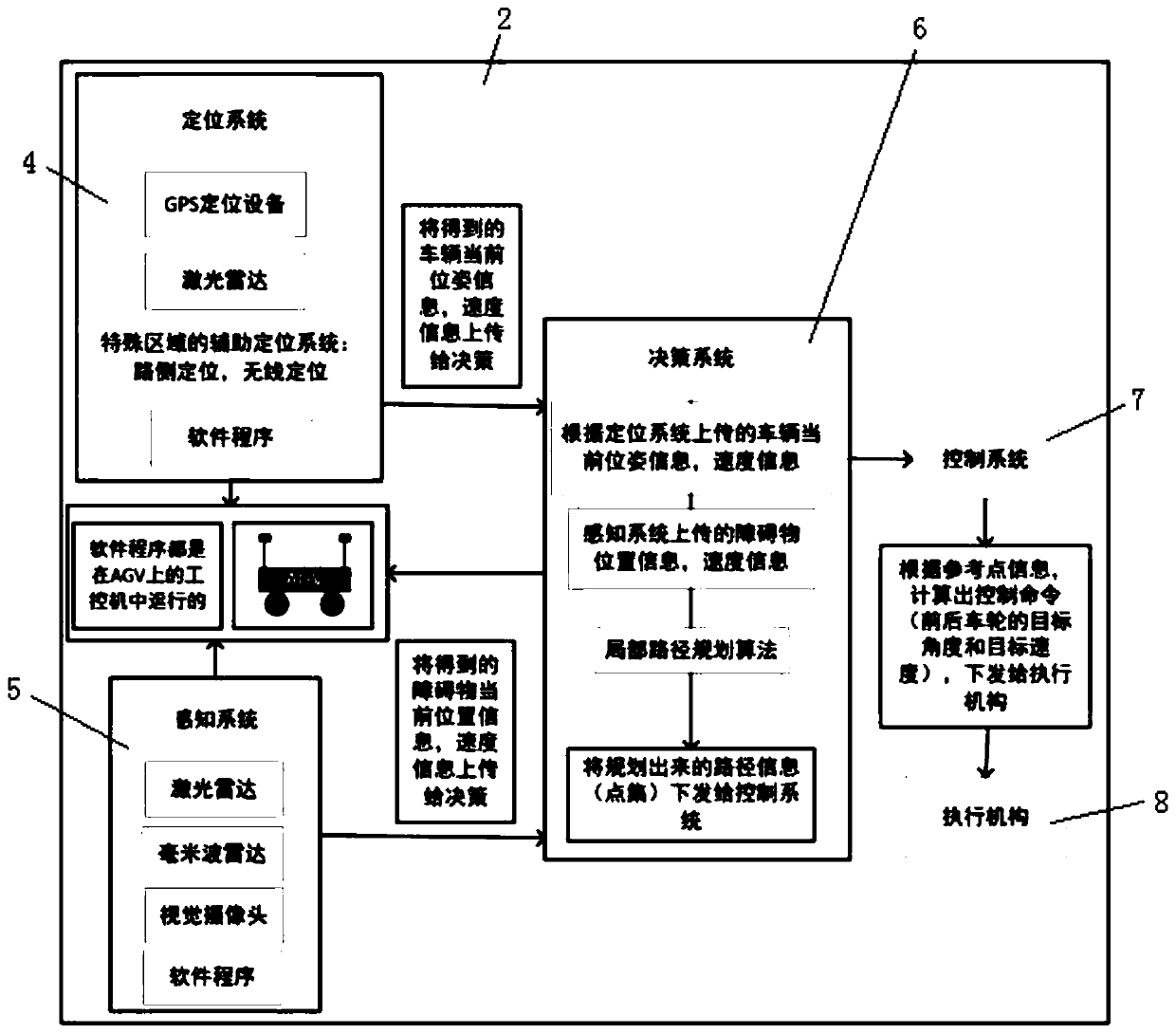
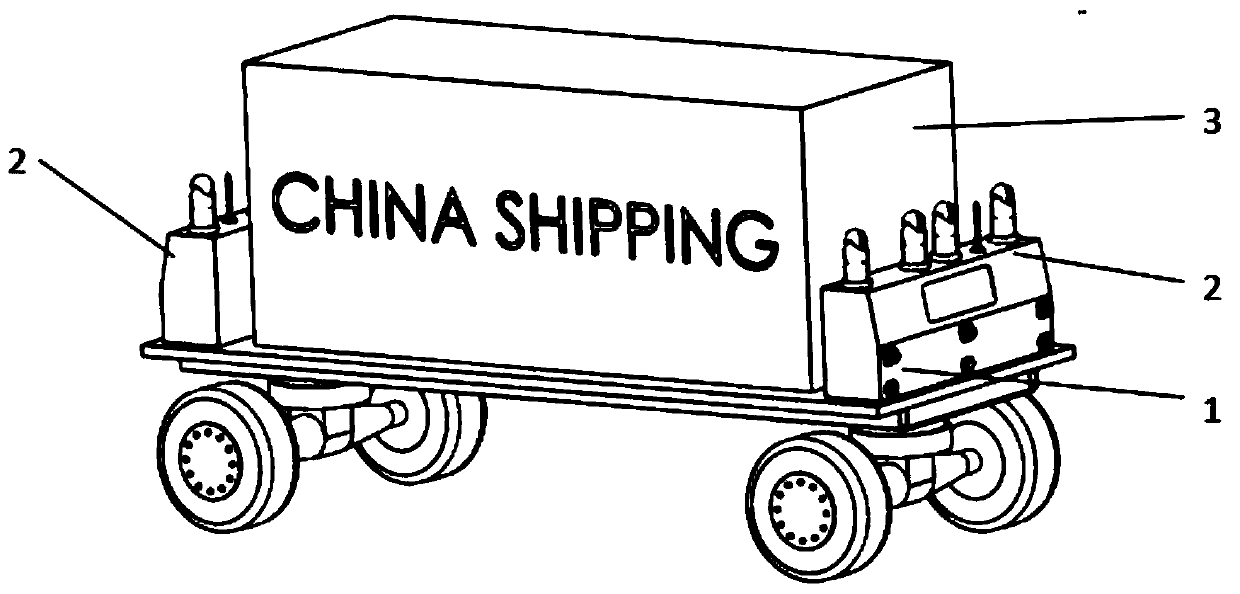
[0032] The automatic guidance system applied to unmanned freight vehicles in closed sites in this embodiment, such as figure 1 , 2 , 3, the automatic guidance system 2 includes a positioning system 4, a perception system 5, a decision system 6 and a control system 7,
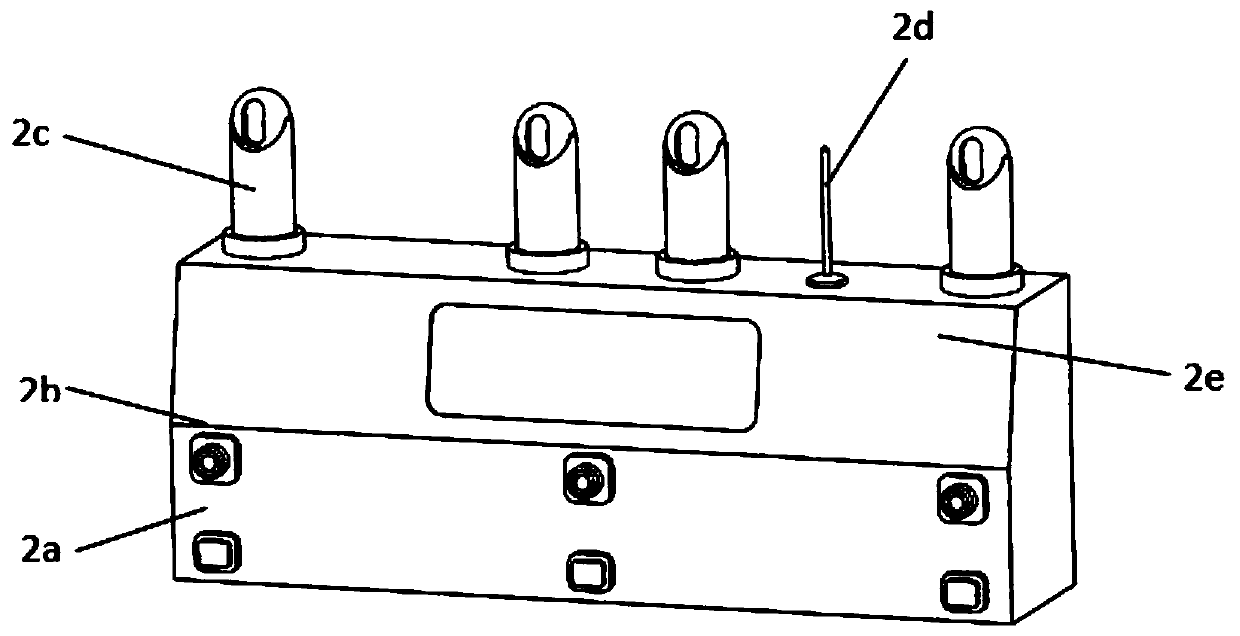
[0033] The positioning system 4 adopts GPS (labeled as 2d in the figure) and inertial navigation as the main positioning system 4, and adopts the combination of the vehicle-mounted sensor group and the roadside sensor group as the auxiliary positioning system 4, which is used to combine the main positioning system 4 and the auxiliary positioning system. The accurate and stable pose information of the center point of the vehicle obtained by system 4 in real time is uploaded to decision-making system 6;
[0034] The perception system 5 uses a multi-sensor combination of laser radar 2b, millimeter wave radar 2a, and visual camera 2c to monitor the lane, detect, identify and classify obstacles, and judge the runnin...
specific Embodiment approach 2
[0037] The automatic guidance system applied to unmanned freight vehicles in closed sites in this embodiment, such as figure 1 , 2 , 3, in the positioning system 4, the main positioning system 4 includes a GPS (marked as 2d in the figure) that is respectively arranged on the top of the front of the freight vehicle and the box body 2e at the rear of the truck, and the GPS (labeled as 2d in the figure) The antenna in 2d) protrudes from the surface of the box body 2e, and the gyroscope inertial navigation is selected and installed in the middle of the body 1 as the main positioning system 4; the car body 1 carries goods 3;
[0038] And the vehicle-mounted sensor group of the auxiliary positioning system 4 includes 6 laser radars 2b, 8 cameras 2c, and 6 millimeter-wave radars 2a. 2c, the combination of three millimeter-wave radars 2a is used as an auxiliary positioning system 4, a box 2e is installed at the front or rear of the car, and four cameras 2c are arranged on the top sur...
specific Embodiment approach 3
[0041] In the automatic guidance system applied to unmanned freight vehicles in a closed field in this embodiment, the perception system 5 uses the laser radar 2b group at the front and rear of the vehicle to measure the distance of the obstacle and estimate the distance of the obstacle. Running speed: Use the 2c group of on-board cameras to detect, identify and classify obstacles, and detect lanes, and use the millimeter wave radar 2a group to accurately measure the running speed information of obstacles; complete the detection and monitoring of obstacles through multi-sensor fusion technology Classify, and then output the detected obstacle distance, speed information and size information of the obstacle, and upload the obtained obstacle information to the decision-making system 6 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com