Wheel leg type mobile robot with flexible trunk
A mobile robot and robot technology, applied in the direction of manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of inflexibility, inability to move, complex wheel-leg conversion mechanism, etc., and achieve the effect of flexible control, simple mechanism, and avoiding overturning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in detail below in conjunction with the drawings and embodiments.
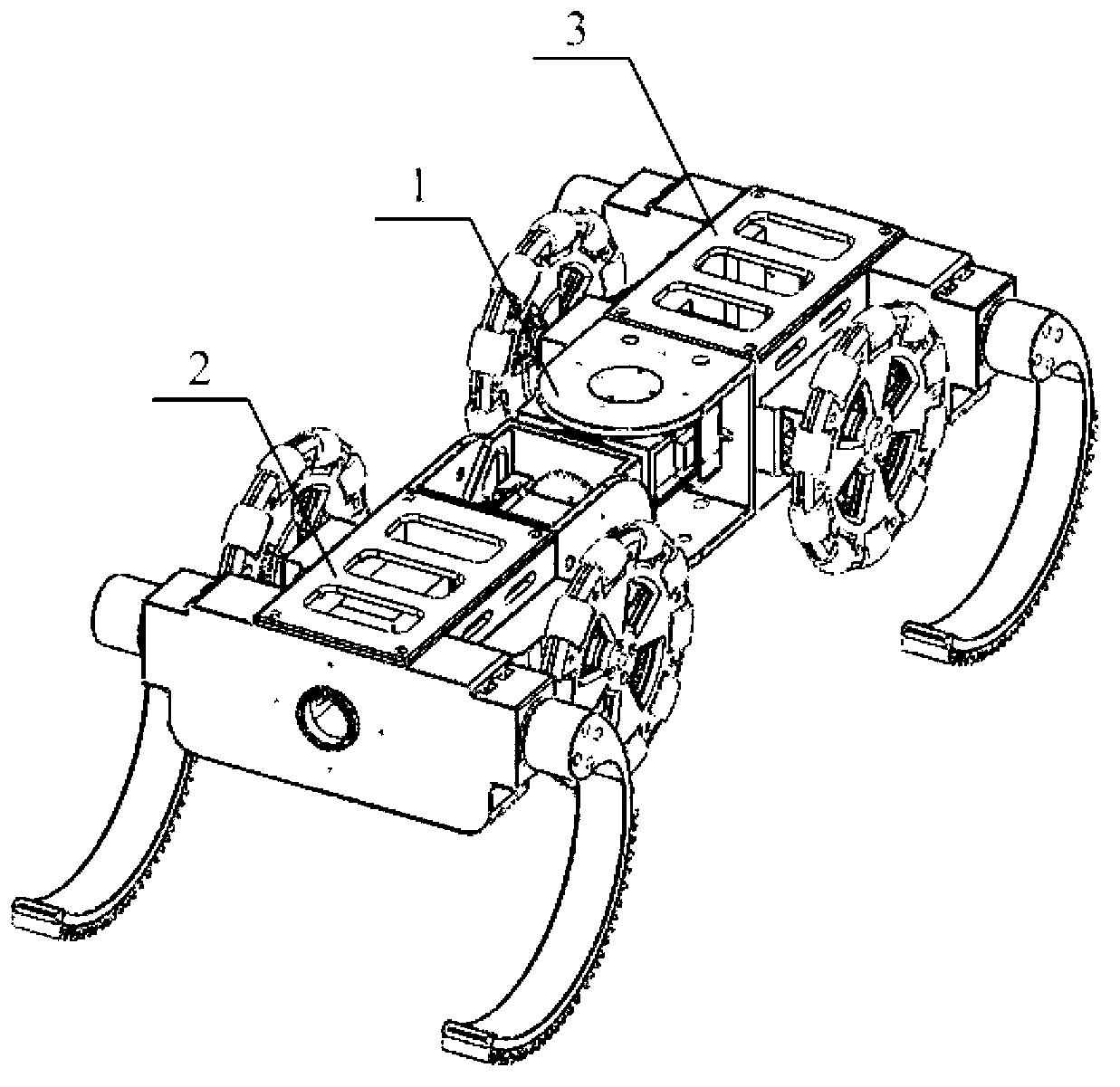
[0025] Such as figure 1 Shown is a structure diagram of a wheel-legged mobile robot. The robot is composed of three parts: the robot torso 1, the front wheel-leg device 2 and the rear wheel-leg device 3. The front wheel leg device 2 and the rear wheel leg device 3 are basically the same.
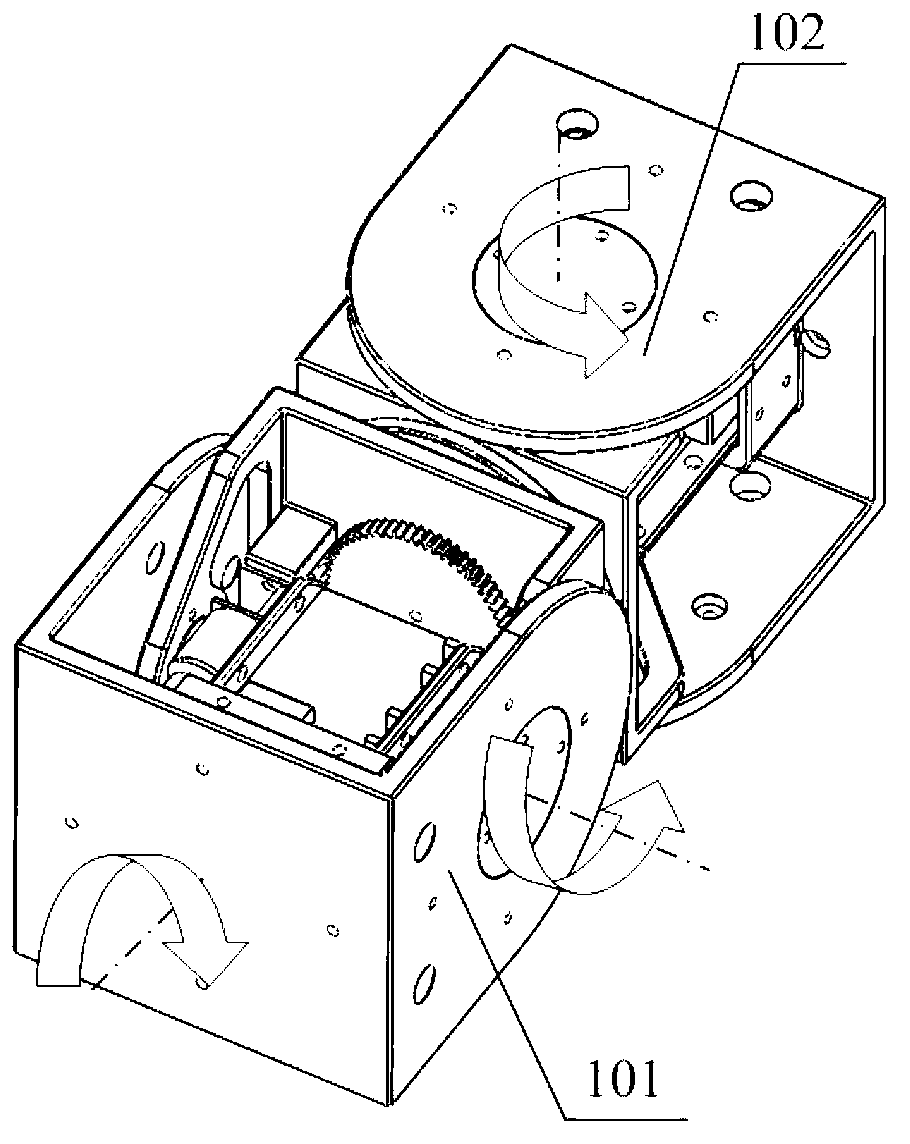
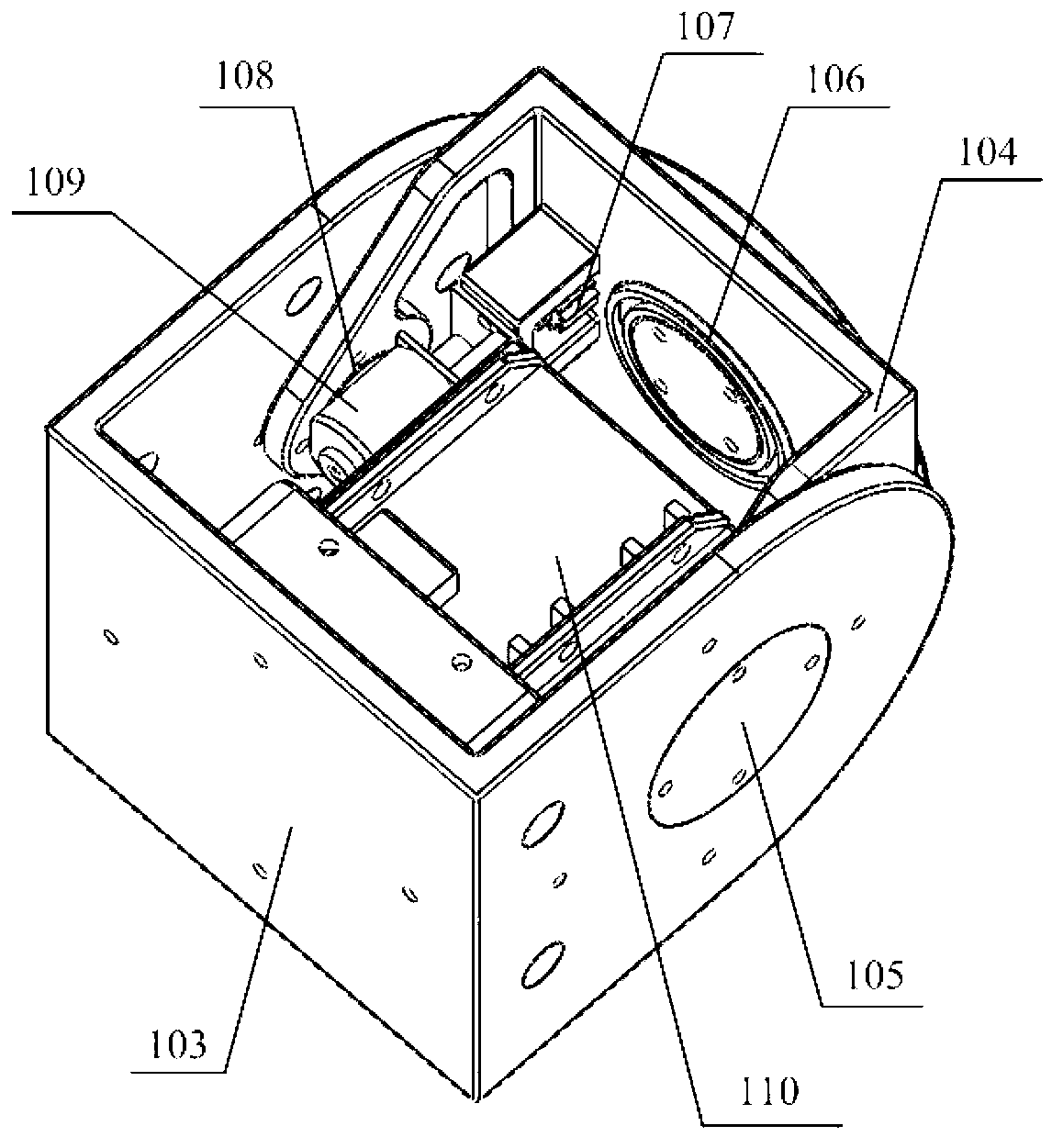
[0026] Such as figure 2 As shown, it is a structural diagram of the robot torso 1. The robot torso 1 is formed by two isomorphic joint modules 101 and 102 fixedly connected through the fixing holes of the respective rotating disks. The turning axes of the joint modules 101 and 102 are orthogonal to each other. The robot torso 1 has 3 degrees of freedom, the degree of freedom of rotation of the joint module 101 in the vertical plane, the degree of freedom of rotation of the joint module 102 in the horizontal plane, and the degree of freedom of twisting between the joint modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com