Semantic segmentation method of 3D point cloud data based on deep learning and self-attention
A technology for point cloud data and semantic segmentation, applied in image data processing, image analysis, character and pattern recognition, etc., can solve the problem of low segmentation accuracy and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
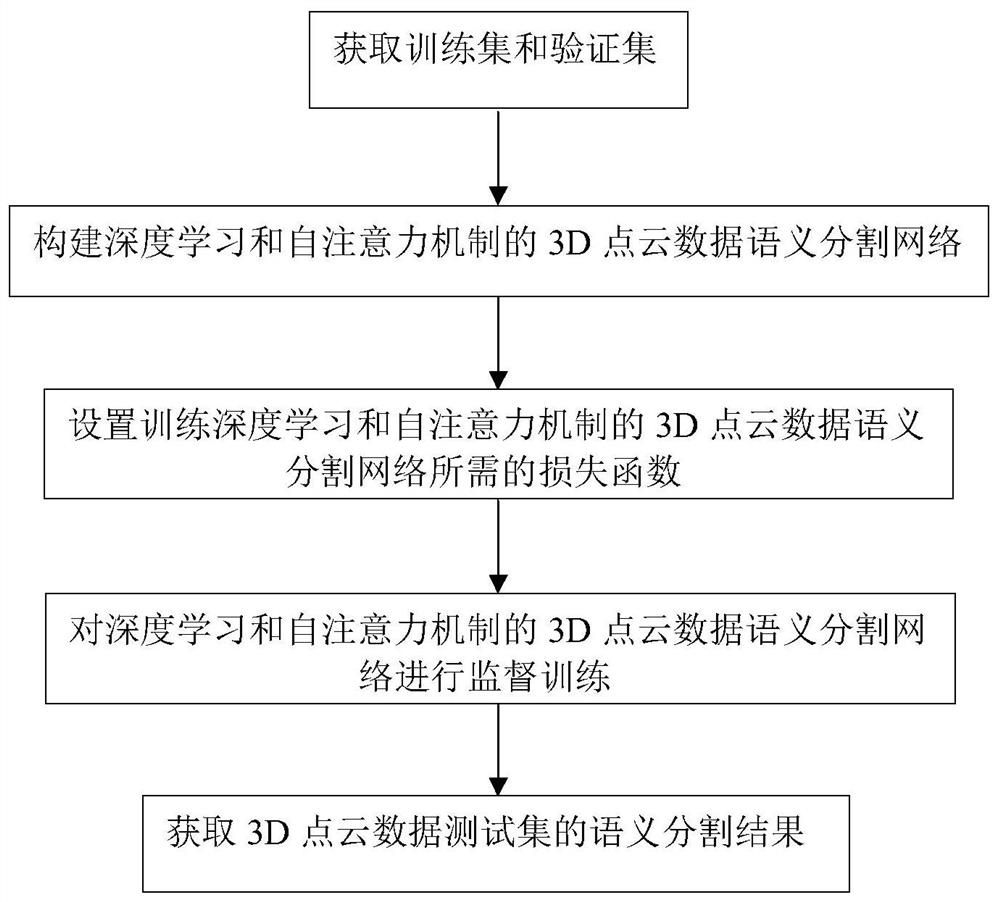
[0032] Refer figure 1 The present invention includes the following steps:
[0033] Step 1) Get the training set R 2 And verification set V 2 :
[0034] Step 1A) Get the 3D point cloud data file with the label from the database f: {f 1 , F 2 , ..., f i , ..., f f ,}, And proportion there is N R 3D point cloud data file as an initial training set R 0 , The rest f (1-N R 3D point cloud data file as an initial verification set V 0 , F i Indicates the i-th 3D point cloud data file, f is the total number of 3D point cloud data file, f ≥ 100, 0.6 ≤ N R R = 0.8, this will randomly select 80% of 3D point cloud data files from the database as the initial training set R 0 , The remaining 20% 3D point cloud data files as the initial verification set V 0 ;
[0035] Step 1B) Put R 0 Enter the PDAL library for blocking to get the training data block set R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com