Pantograph contact point real-time detection algorithm based on monocular infrared image
An infrared image and real-time detection technology, applied in the field of traffic safety engineering, can solve the problem of not being able to highlight the characteristics of contact lines and pantographs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
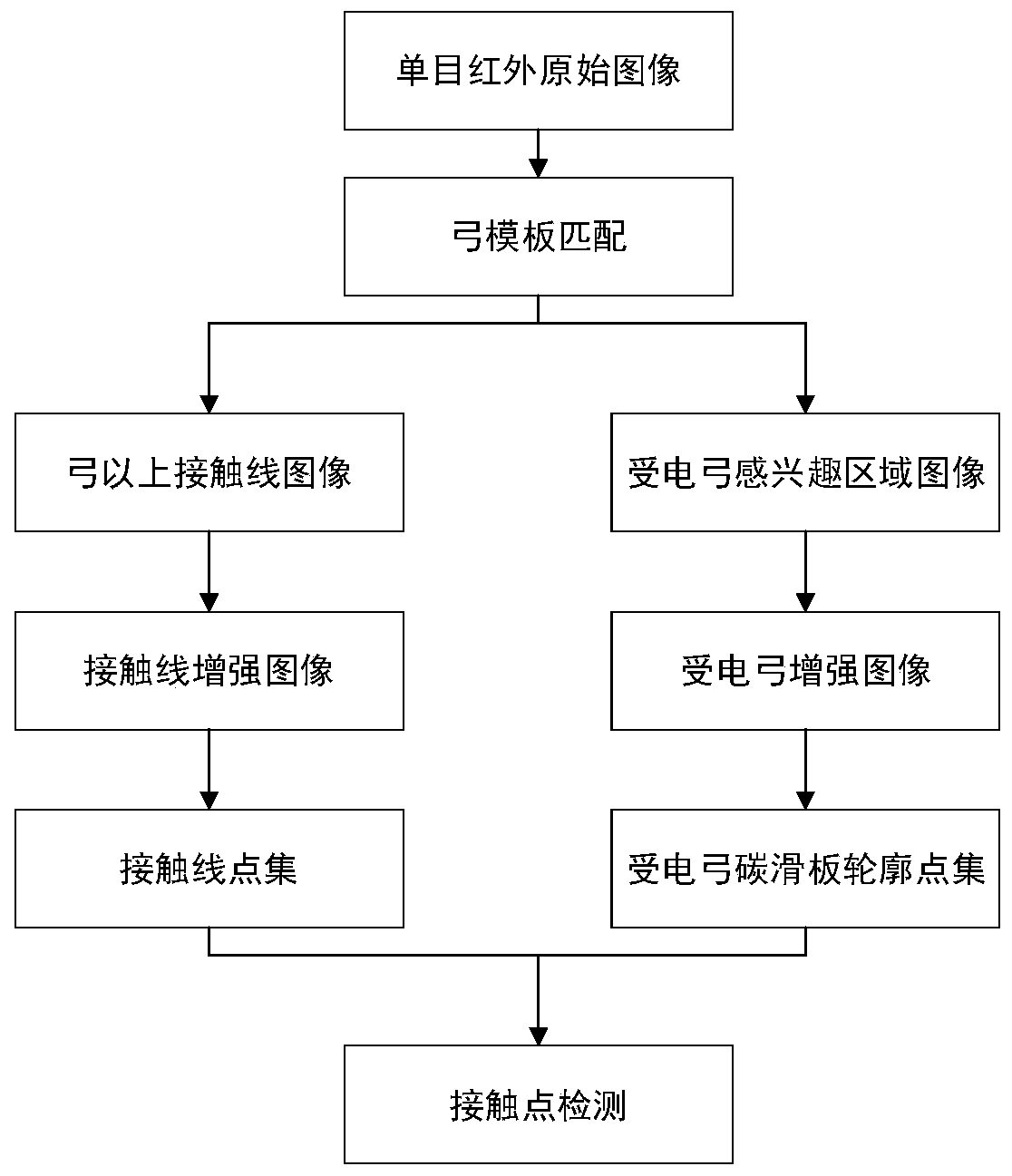
[0058] like figure 1 Shown is a flow chart of a real-time contact point detection algorithm based on a monocular infrared image provided by an embodiment of the present invention, including the following steps:
[0059] S1. Use the bow template intercepted from the first original image of the infrared video frame sequence to perform template matching on the monocular infrared original image acquired in real time to determine the position of the pantograph;
[0060] S2. According to the position of the pantograph, the image of the contact line above the bow and the image of the region of interest of the pantograph are respectively extracted from the monocular infrared original image;
[0061] S3. Perform image enhancement operations on the contact line image above the bow and the pantograph image of interest respectively, to obtain the enhanced contact line image and the enhanced image of the pantograph;
[0062] S4, carry out pixel normalization operation and parameter optimi...
Embodiment 2
[0065] Based on the principle of Embodiment 1, this embodiment illustrates the implementation method of the above steps by way of example.
[0066] Step S1, use the bow template intercepted from the first original image of the infrared video frame sequence to perform template matching on the monocular infrared original image acquired in real time, and determine the position of the pantograph.
[0067] Exemplarily, a near-infrared camera and a high-definition visible light camera can be used to obtain real-time monocular infrared original images captured by the camera while the locomotive is moving, and use the bow template intercepted from the first original image of the infrared video frame sequence to analyze the monocular infrared original The pantograph in the image is matched to realize the positioning of the pantograph. The positioning rectangle of the pantograph obtained by template matching is (X, Y, W, H), where (X, Y) is the coordinates of the upper left corner of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com